Human-Machine Interfaces(HMIs)-GOT GOT2000 Series

- Test operation
- Test operation
- One-touch tuning function
- Tuning function
- Servo amplifier graph function (startup, adjustment)
- FA transparent function
- System launcher (servo network) function
- Drive recorder function
- Servo amplifier data analysis
- Servo amplifier graph function (maintenance)
- Backup/Restoration function
- Monitor function
- R motion monitor function/Q motion monitor function
- R motion SFC monitor function/Q motion SFC monitor function
- Motion program editor function
- Servo amplifier monitor function
- Intelligent module monitor function
- Alarm display function
- Encoder communication circuit diagnosis
- Machine diagnosis (friction estimation, vibration estimation)
- Machine diagnosis (tension estimation)
- Machine diagnosis (total travel distance)
- Gear Failure Diagnosis
- Machine diagnosis function
- Machine failure prediction function
- Servo amplifier life diagnosis function
- Switching axis numbers (station numbers) of servo amplifiers
Startup, adjustment
MR-J5 MR-J4 MR-JET MR-JETest operation
Sample
screen End user OEM Easy
startup
screen End user OEM Easy
startup
GT27
GT25
GT21
GT SoftGOT2000
(Single-ch)* GT SoftGOT2000
(Multi-ch)
(Single-ch)* GT SoftGOT2000
(Multi-ch)
- *Supported by MR-J4-□B(-RJ), MR-J4W2-□B, MR-J4W3-□B, MR-JE-□B only.
See Supported models and versions for details.
Check the equipment on the on-site GOT before going into full-scale operation
Without the need to set up a PC, you can confirm if the servo amplifier is working correctly before full-scale operation by checking on the on-site GOT.
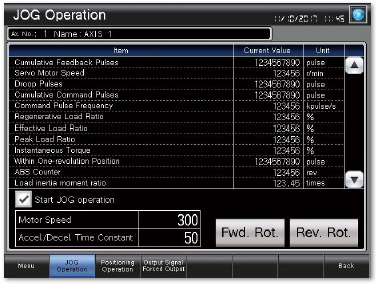
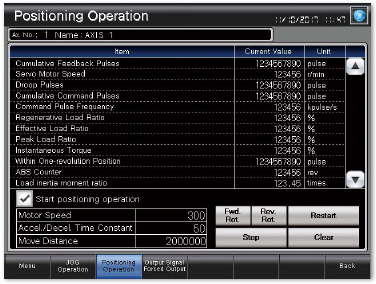
■Sample screens
With the sample screens, you can perform test operations equivalent to those performed with MR Configurator2, such as JOG operation, positioning operation, and output signal forced output.
JOG operation screen
Positioning operation screen
Motor-less operation

Output signal (DO) forced output screen

- *All of the above images are the connection sample screens of MR-J5-□G.
●: Supported - : Not supported
| No. | Function |
MR-J5-□G(-RJ) MR-J5W2-□G MR-J5W3-□G |
MR-J5D1-□G4 MR-J5D2-□G4 MR-J5D3-□G4 |
MR-J5-□B(-RJ) MR-J5W2-□B MR-J5W3-□B |
MR-J4-□B(-RJ) MR-J4W2-□B MR-J4W3-□B |
MR-J4-□A | MR-J4-□A-RJ | MR-J4-□GF(-RJ) | MR-JET-□G | MR-JE-□B | MR-JE-□A | MR-JE-□C |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | JOG operation | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 2 | Positioning operation | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 3 | Motor-less operation | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 4 | Output signal (DO) forced output | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 5 | Single-step feed | ● | ● | - | - | - | ● | - | ● | - | - | - |