Simulation tools MELSOFT Gemini

Learn the basics of using MELSOFT Gemini.
-

Attach and detach products
(This is a Japanese video. Please display English subtitles.)
How to attach products together and detach them after transport (Attach statement, Detach statement) Practice file -
Change AGV transport rules
(This is a Japanese video. Please display English subtitles.)
Rules for assigning transport tasks to AGVs and how to change transport rules when there are multiple origins/destinations Practice file -
Change behavior according to product type
(This is a Japanese video. Please display English subtitles.)
How to change destinations or behavior based on part types Practice file -

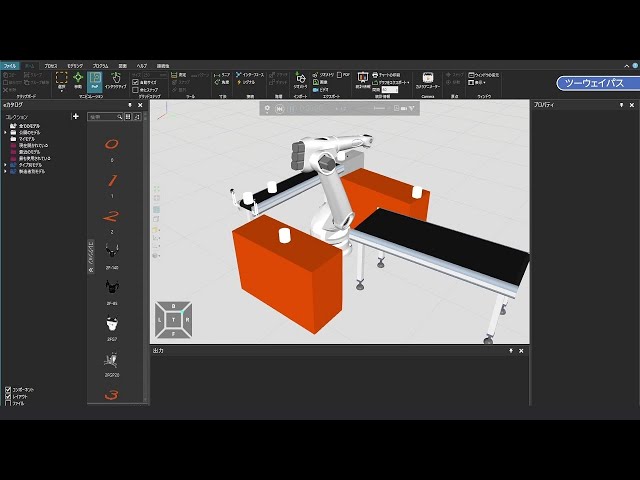
Change conveyor travel direction
(This is a Japanese video. Please display English subtitles.)
How to use a conveyor that can change its forward/backward direction (Two Way Conveyor) Practice file -
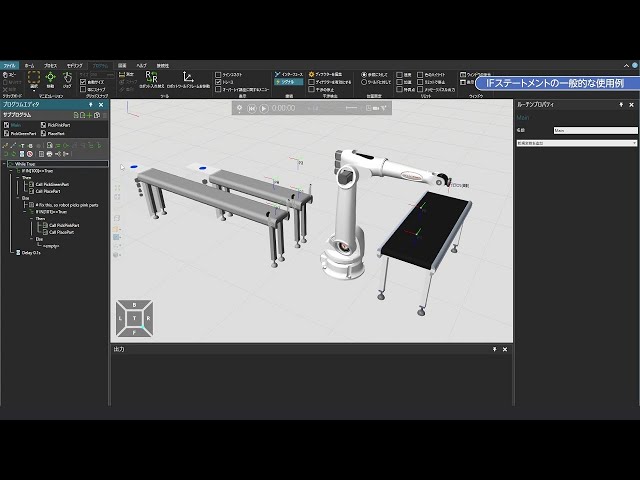
Change processing based on product info
(This is a Japanese video. Please display English subtitles.)
How to get product information and change the process executed (IF statement, SWITCH CASE statement, ProductType) Practice file -

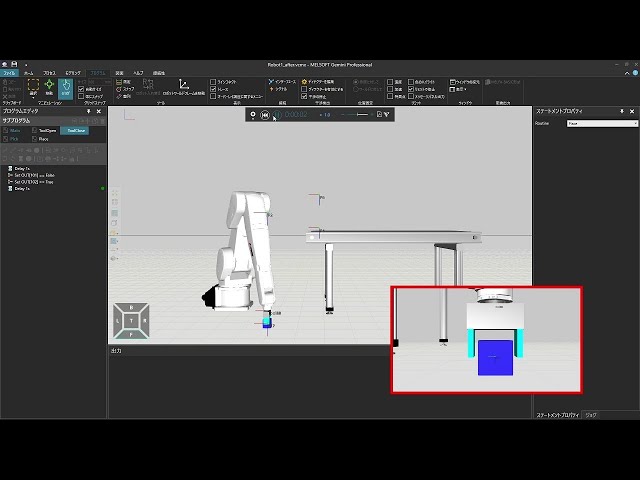
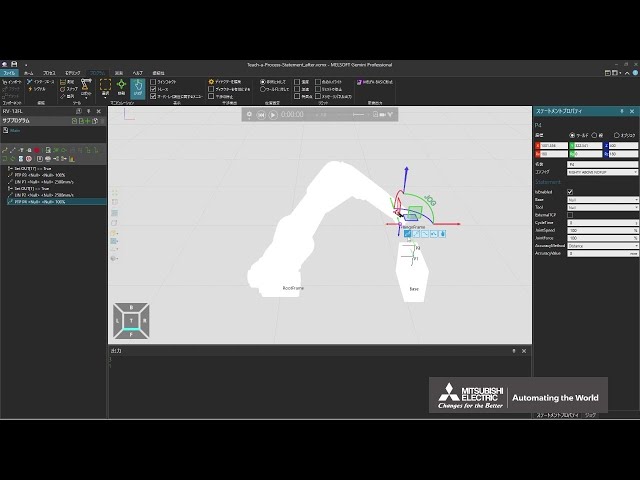
Change robot motion speed
(This is a Japanese video. Please display English subtitles.)
How to change robot motion speeds in line simulation (Robot Transport Controller)
(Related video: Learn about controllers that control robots) Practice file -

Change the AGV pick & place position
(This is a Japanese video. Please display English subtitles.)
How to change the temporary stop position when an AGV picks up or places a product Practice file -
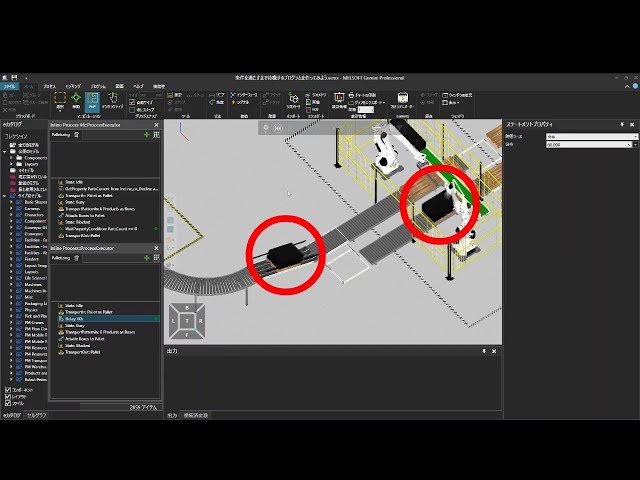
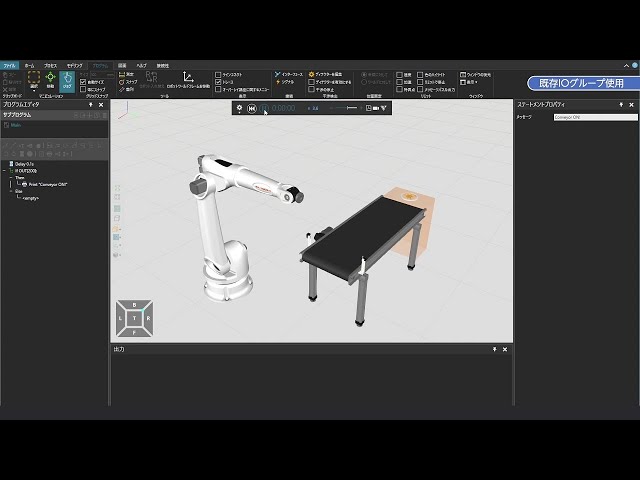
Change the timing of product loading
(This is a Japanese video. Please display English subtitles.)
How to wait for the previous processing to complete before loading a product (start of Transport In, Transport Wait) Practice file -

Change worker standing positions (1/2)
(This is a Japanese video. Please display English subtitles.)
How to add new standing positions for people, AGVs, and forklifts at workstations
(Related video: Change the AGV pick & place position) Practice file -

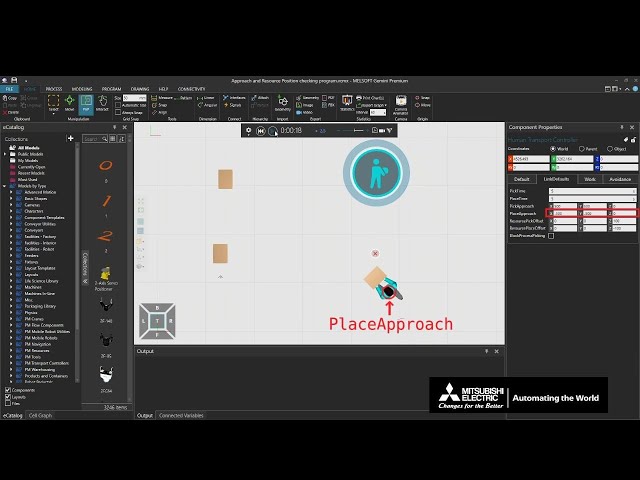
Change worker standing positions (2/2)
(This is a Japanese video. Please display English subtitles.)
How to set frames for worker standing positions
(Resource Position Frame, ResourcePickOffset, ResourcePlaceOffset, PickApproach, PlaceApproach) Practice file -

Check worker travel distance and time
(This is a Japanese video. Please display English subtitles.)
How to display worker travel distance and time on the statistics dashboard for review. Practice file -
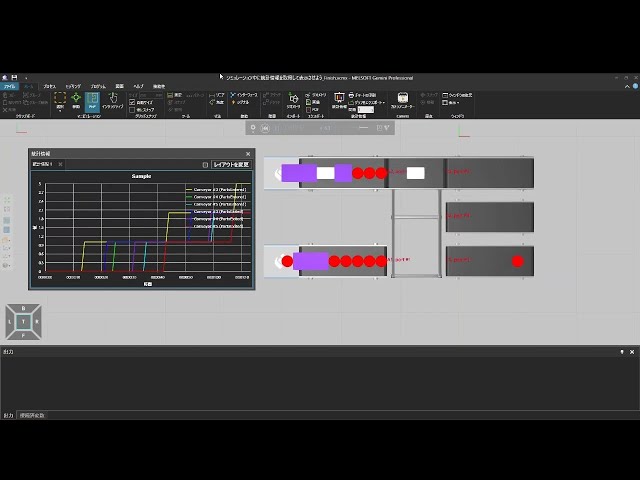
Collect and display statistics during simulation
(This is a Japanese video. Please display English subtitles.)
How to display production counts and other statistics on graphs Practice file -
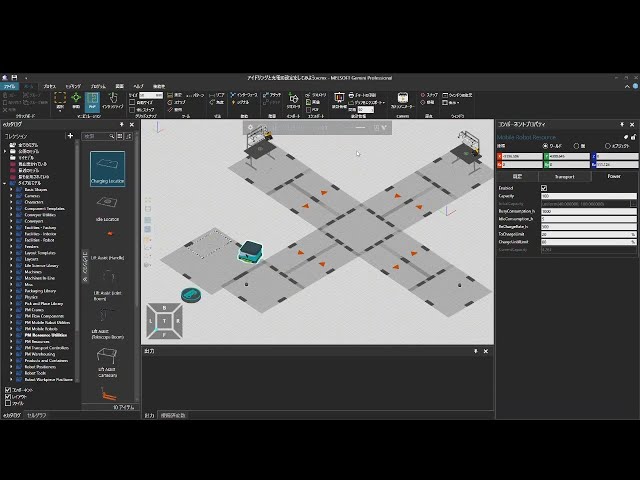
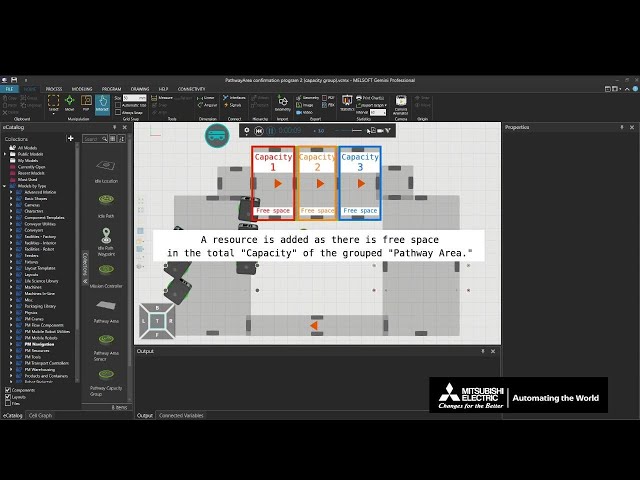
Configure idling and charging
(This is a Japanese video. Please display English subtitles.)
How to configure AGV temporary waiting and automatic charging Practice file -

Control AGV transport
(This is a Japanese video. Please display English subtitles.)
ChargeOnIdle is a feature available from Gemini 1.48.
How to avoid collisions between AGVs and how to control AGV states
(Related videos: How to Detect Obstacles and Set Pathways, How to Set Resources and Controllers (Part 3 of 4), Configure idling and charging, Create an automatic door (1/2)) Practice file -

Convey work suspended from hangers (1/2)
(This is a Japanese video. Please display English subtitles.)
How to convey work suspended from hangers
(Overhead Conveyor settings, product on-hanger detection, flow settings) Practice file -

Convey work suspended from hangers (2/2)
(This is a Japanese video. Please display English subtitles.)
How to convey work suspended from hangers
(Process settings) Practice file -
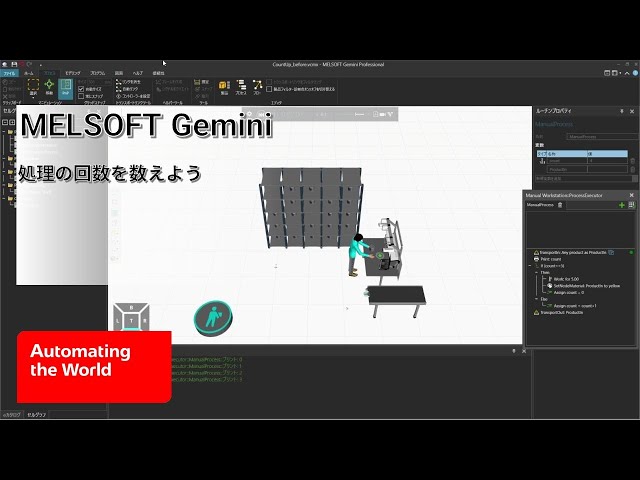
Count the number of times a process runs
(This is a Japanese video. Please display English subtitles.)
How to increment a counter for the number of times a process executes (routine variable, Assign Variable statement, IF statement) Practice file -

Create a global signal
(This is a Japanese video. Please display English subtitles.)
How to create a global signal and check or change its value (Signal Relay) Practice file -
Create a routine that waits until conditions are met
(This is a Japanese video. Please display English subtitles.)
How to configure waiting until a condition is met
(Get property, wait for property condition) Practice file -
Create an automated warehouse
(This is a Japanese video. Please display English subtitles.)
How to build an automated warehouse by combining items from the eCatalog
(warehouse shelf "Warehouse Shelf", crane "Stacker Crane", crane controller "Single Rail Transport Controller", etc.) -

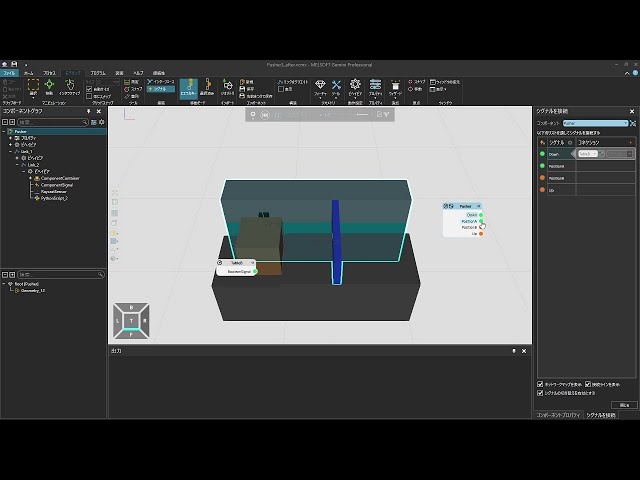
Create an automatic door (1/2)
(This is a Japanese video. Please display English subtitles.)
How to create an automatic door that opens when a person approaches and closes when they leave (Rolling Steel Door v2, Pathway Area Sensor) Practice file -

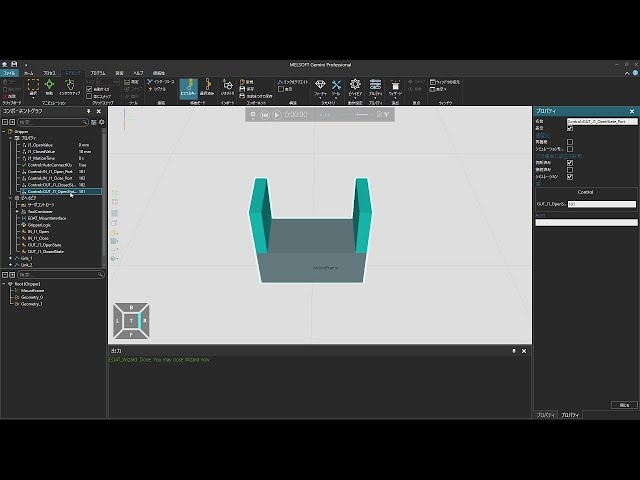
Create an automatic door (2/2)
(This is a Japanese video. Please display English subtitles.)
How to create an automatic door that opens when a product arrives on a conveyor and closes after it passes (Rolling Steel Door v2) Practice file -
Create global variables (1/2)
(This is a Japanese video. Please display English subtitles.)
How to create global variables using eCatalog models (PM Global Variables)
(Related videos: Let's make a curved conveyor, Create a routine that waits until a condition is met) Practice file -
Create global variables (2/2)
(This is a Japanese video. Please display English subtitles.)
How to change eCatalog-based global variables from a process (get property, assign variable, wait for property condition) Practice file -

Deform products
(This is a Japanese video. Please display English subtitles.)
How to change product properties during transport to deform them Practice file -

Delete a Product in a Line Simulation
How to delete a product in a line simulation (Sink Process, Remove) Practice file -
Depalletize using Detach
(This is a Japanese video. Please display English subtitles.)
How to separate products that had been attached during loading using Detach
(Related video: Palletize using Transport In pattern) Practice file -

Display statistics in the 3D world
(This is a Japanese video. Please display English subtitles.)
How to display equipment status, production counts, etc., in the 3D world using beacons or text Practice file -
Export layout as CAD file
(This is a Japanese video. Please display English subtitles.)
How to export a layout created in Gemini to 3D CAD formats -

Export simulation as video
(This is a Japanese video. Please display English subtitles.)
How to use the export-to-video feature during simulation to save video files (avi, mp4, mov) (View Editor, Fly Camera)
(Related videos: Set camera viewpoints for recording, Record simulation animation) Practice file -
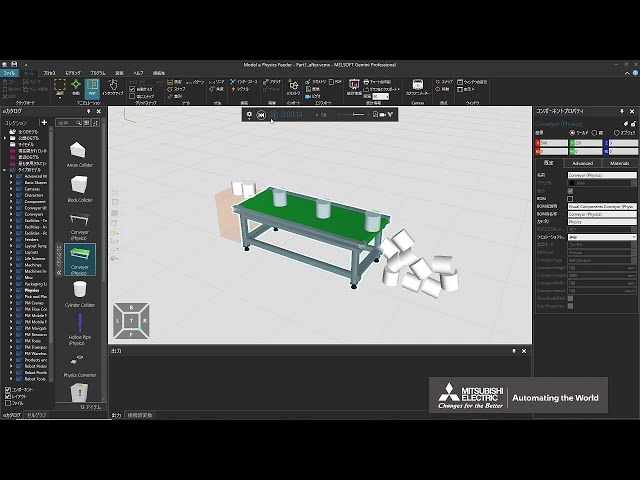
Generate products during simulation (1/10)
(This is a Japanese video. Please display English subtitles.)
How to generate products during simulation using the Basic Feeder
Note: Basic Feeder was removed from version 1.410 onward. Select "Version 4.8 (legacy)" from eCatalog [Edit Source] to use it. -
Generate products during simulation (10/10)
(This is a Japanese video. Please display English subtitles.)
How to use a Signal Feeder to generate products during simulation
Note: After version 1.410, settings changed. Generate matching product types → Generate matched product types. [PartPositioning] default changed from "Centered" to "RandomOffset". [CreateSignalType], [ComponentName], and [ProdID] removed. -

Generate products during simulation (2/10)
(This is a Japanese video. Please display English subtitles.)
How to generate products during simulation using two types of PM Flow Components -
Generate products during simulation (3/10)
(This is a Japanese video. Please display English subtitles.)
How to generate products during simulation using the Advanced Feeder -
Generate products during simulation (4/10)
(This is a Japanese video. Please display English subtitles.)
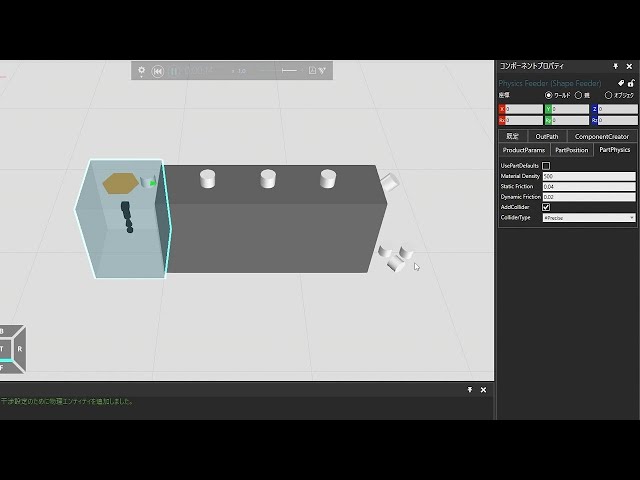
How to generate products during simulation using the Shape Feeder
Note: After version 1.410, settings changed. [Default] tab - [Product] and [ComponentCreator] tab → [ProductCreator] tab. [ShowMessages] removed. -
Generate products during simulation (5/10)
(This is a Japanese video. Please display English subtitles.)
How to generate products during simulation using the Pattern Feeder
Note: After version 1.410, settings changed. [Pattern] tab → [ProductCreator] tab, simulation automatically sets product type and assembly on start. [ProdID] removed. [CreationInterval] → [ProductCreator] tab - [Interval]. -

Generate products during simulation (6/10)
(This is a Japanese video. Please display English subtitles.)
How to use a Feeder Point to generate products during simulation -
Generate products during simulation (7/10)
(This is a Japanese video. Please display English subtitles.)
How to use a Pallet Feeder to generate products during simulation -
Generate products during simulation (8/10)
(This is a Japanese video. Please display English subtitles.)
How to use a Pallet Filter to generate products during simulation -

Generate products during simulation (9/10)
(This is a Japanese video. Please display English subtitles.)
How to use a Bowl Feeder to generate products during simulation -

Have one resource perform consecutive tasks
(This is a Japanese video. Please display English subtitles.)
When multiple tasks and resources exist, how to have a single specified resource carry out multiple tasks consecutively (Human Transport Controller ReserveResource, ReleaseResource) Practice file -

How to Attach Multiple Components
An instruction video on how to use the Attach command to bring multiple components together and operate them as one component. Practice file -

How to Change the Priority of Transporting and Work
An instruction video on how to set levels of priority to transport tasks and work tasks. Practice file -
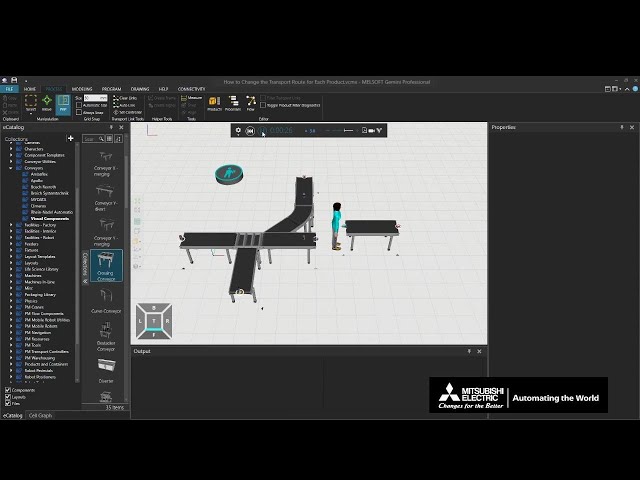
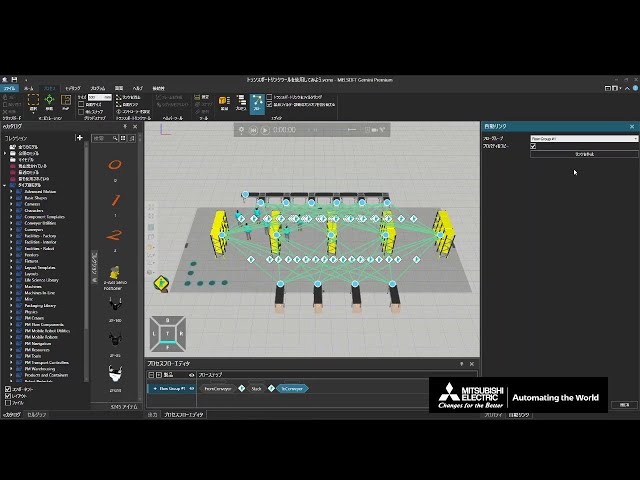
How to Change the Transport Route for Each Product
An instruction video on how to change the transport route for each type of product on a conveyor Y - divert.
(Changing flow groups, process flow, the RoutingRule, and transport solution rules) Practice file -

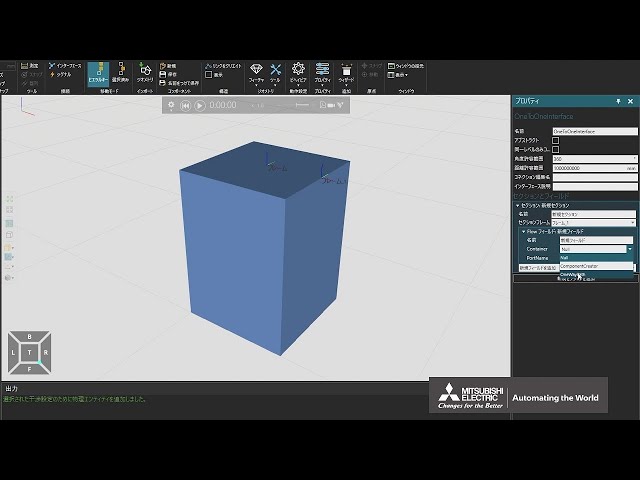
How to Connect Component
An instruction video about the One-Way Interface, Two-Way Interface, and PnP. -

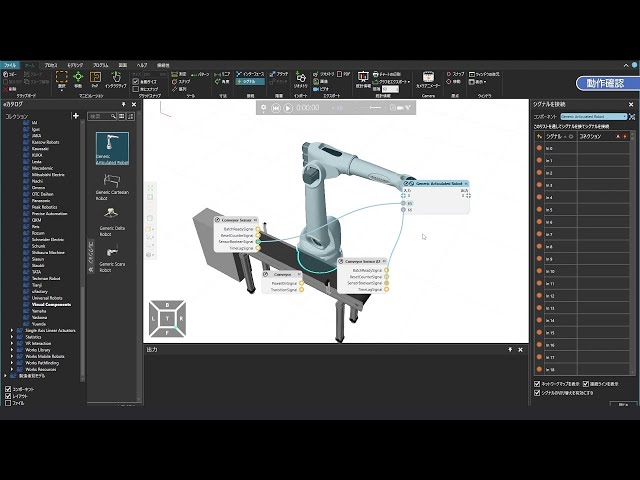
How to Control Robots Using a Controller (Part 1 of 3)
An instruction video on how to use a controller to control a robot using line simulation. (Changing the behavior, speed, and start position of the robot arm) Practice file -

How to Control Robots Using a Controller (Part 2 of 3)
An instruction video on how to use a controller to control a robot using line simulation. (operating operation statements, opening and closing the gripper, setting rules for transporting) -

How to Control Robots Using a Controller (Part 3 of 3)
An instruction video on how to use a controller to control a robot using line simulation. (auto-teaching transporting, executing specified routines, setting tools, setting the time and direction of picking up and placing) -

How to Create a 2D Floor Plan
An instruction video on how to output a layout created using Gemini to a 2DCAD file. -

How to Create Assemblies
An instruction video on how to set assemblies in the Product Type Editor and how to use the Assembly Editor. Practice file -

How to Define a Process Modeling Flow
An instruction video on how to set a process modeling flow for a line simulation (Process Flow Editor, Flow Steps, Transport Links, IsOptional, ProcessMode, Get Flow Step, Set Next Flow Step).
*This function is available in Gemini version 1.45 and later. Practice file -

How to Detect Obstacles and Set Pathways
An instruction video on how to make a mobile robot detect obstacles and how to set pathways to limit the mobile robot's range of movement. Practice file -

How to generate and modify robot program in Process Modeling
An instruction video on how to record, modify, and run a robot program with process modeling. Practice file -
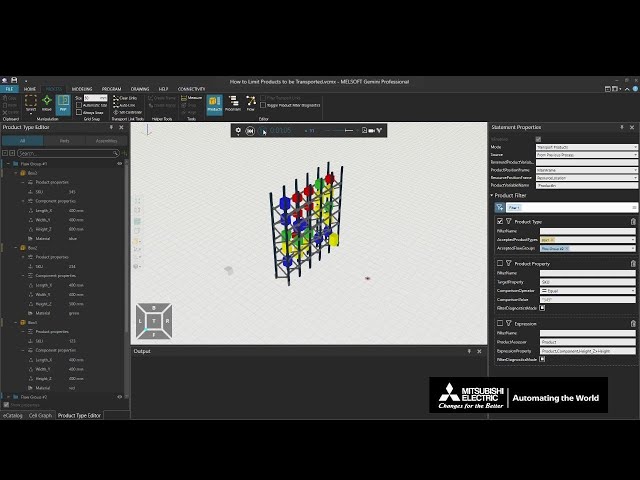
How to Limit Products to be Transported
An instruction video on how to limit the types of products to be transported in a line simulation using the product filter function.
*This function is available in Gemini version 1.48 and later. Practice file -

How to Install and Use Gemini
An instruction video on how to install MELSOFT Gemini with an explanation of its basic operations. -

How to Operate with Multiple Components
An instruction video on how to make multiple components, such as robots and equipment, operate together. Practice file -
How to Set Resources and Controllers (Part 1 of 4)
An instruction video on how to set controllers and resources such as humans and mobile robots for process modeling. (Specifying transporting and work priorities, task allocation priorities to resource, product collection method, and tools to be used) Practice file -

How to Set Resources and Controllers (Part 2 of 4)
An instruction video on how to set controllers and resources such as humans and mobile robots for process modeling. (Setting waiting/charging locations for mobile robots, making robots wait temporarily with products, specifying humans and mobile robots to load and unloads products, specifying loading and unloading areas, reserving resources to machines) Practice file -
How to Set Resources and Controllers (Part 3 of 4)
An instruction video on how to set controllers and resources such as humans and mobile robots for process modeling. (Detecting and avoiding obstacles, specifying movement ranges and restricting resources to those ranges) Practice file -
How to Set Resources and Controllers (Part 4 of 4)
An instruction video on how to set controllers and resources such as humans and mobile robots for process modeling. (Changing revolution and movement speeds, stopping resource operations, setting an order for unloading multiple parts, changing the way of holding products and posture of Humans) Practice file -

How to Show/Hide Components
An instruction video on how to show and hide components such as equipment from the properties and cell graph. -

How to Transport Products by Human
An instruction video on how to set Humans to transport products between specified places. Practice file -
How to Use the Coordinate Systems
An instruction video explaining the coordinate system on the Gemini 3D world. -
How to Use Signals to Control the Conveyor
An instruction video on how to control operations from processes using conveyor signals. Practice file -
How to Use Tools to Transport Products
An instruction video on how to transport products with a Human using a Pallet Jack. Practice file -
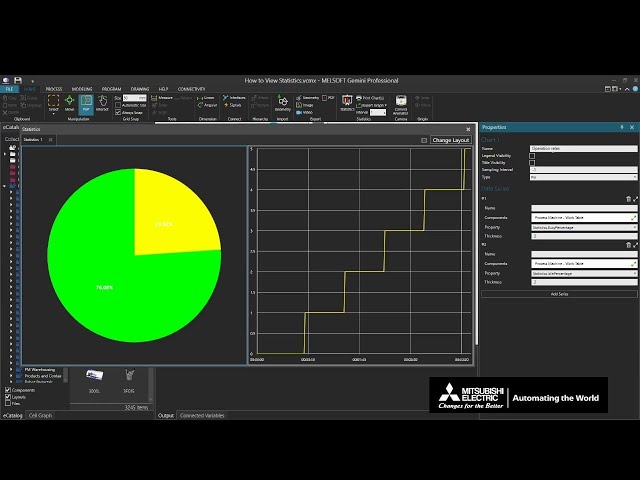
How to View Statistics
An instruction video on how to display statistics such as production amounts and operating statuses of devices on statistics graphs and time charts. Practice file -

How to Visualize Objects in Gemini
An instruction video on how to change display settings such as the background color, grid lines and the render mode. Practice file -

If a desk is full, send products to another desk
(This is a Japanese video. Please display English subtitles.)
When a desk is full, place products on another desk and then move them to empty spots when space becomes available Practice file -

Introduction to Interactive VR
How to experience 3D simulations created with MELSOFT Gemini in VR. (DeviceController, Visual Components Experience)
Please be careful of VR sickness.
(Related video: "Model parts that are affected by physical forces and objects" is currently being prepared.) Practice file -
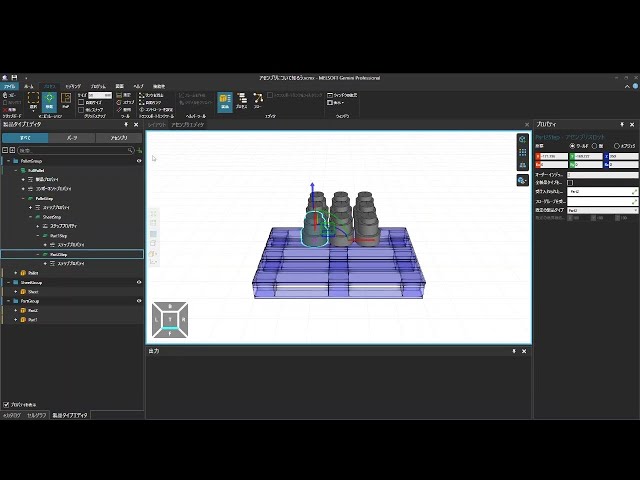
Learn about assemblies
(This is a Japanese video. Please display English subtitles.)
How to set assembly structures composed of multiple products to assemble/disassemble products during simulation Practice file -

Let other workers handle loading/unloading
(This is a Japanese video. Please display English subtitles.)
How to have other workers perform product loading/unloading
Example: Have a worker perform loading/unloading for an AGV Practice file -

Let's assemble a product using multiple parts (1/3)
How to create an assembly Practice file -

Let's assemble a product using multiple parts (2/3)
How to create an assembly using the process "Create" statement. Practice file -
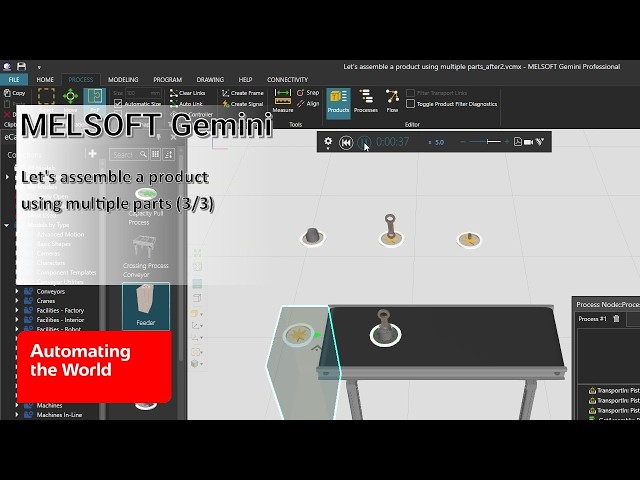
Let's assemble a product using multiple parts (3/3)
How to assemble a product using the parts that flow through the process with the "Construct" statement. Practice file -
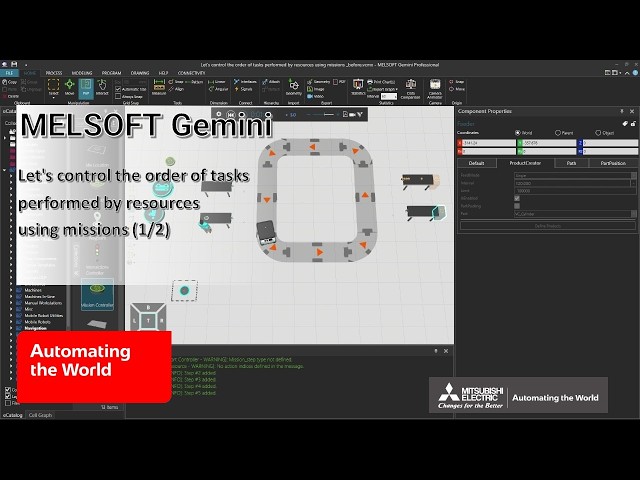
Let's control the order of tasks performed by resources using missions (1/2)
How to control the movement of the mobile robot in the line simulation using the Mission Controller. Practice file -

Let's control the order of tasks performed by resources using missions (2/2)
How to control the movement of the human in the line simulation using the Mission Controller. Practice file -

Let's Learn About Product Destination and Source
Description of the concept and properties of resources (human and mobile robot) used in a setting for transporting products. Practice file -
Let's use the assembly function (1/3)
How to define assemblies for product assembly and disassembly during simulation (Related video: How to Create Assemblies) Practice file -

Let's use the assembly function (2/3)
How to create or disassemble products from the defined assemblies during simulation Practice file -

Let's use the assembly function (3/3)
How to sequentially store the defined assemblies onto pallets during simulation Practice file -

Make defects and breakdowns occur randomly
(This is a Japanese video. Please display English subtitles.)
How to set up random defects and breakdowns (IF statement, uniform function) Practice file -

Match controller and resource colors
(This is a Japanese video. Please display English subtitles.)
How to match the color of a controller (e.g., Human Transport Controller) and resources (e.g., Humans) (ApplyColorToResources) Practice file -

Measure cycle time
(This is a Japanese video. Please display English subtitles.)
How to measure cycle times for machines, robots, and operations (Cycle Time (Signals)) -
Model a warehouse using library products
(This is a Japanese video. Please display English subtitles.)
How to build a warehouse by combining eCatalog items
("Warehouse Shelf", "Warehouse Process Shelf", "Floorspace Buffer", "Single Girder Crane", "Dual Rail Transport Controller", "Stack Feeder", "Pallet Feeder". Related video: Create an automated warehouse) Practice file -

Move a robot from within a process
(This is a Japanese video. Please display English subtitles.)
How to execute a robot program from processes other than the robot itself Practice file -

Palletize using Transport In pattern
(This is a Japanese video. Please display English subtitles.)
How to place multiple products side-by-side for loading and attach products together to export them as one unit
(Related video: Depalletize using Detach) Practice file -
Record simulation animation
(This is a Japanese video. Please display English subtitles.)
How to record simulation results as an animation and make them viewable on mobile devices (Experience format) -

Reflect CSV files into a process (1/3)
(This is a Japanese video. Please display English subtitles.)
How to use a Python script to specify components from CSV file data and change wait times in Delay statements Practice file -
Reflect CSV files into a process (2/3)
(This is a Japanese video. Please display English subtitles.)
How to use a Python script to specify components from CSV file data and add statements Practice file -
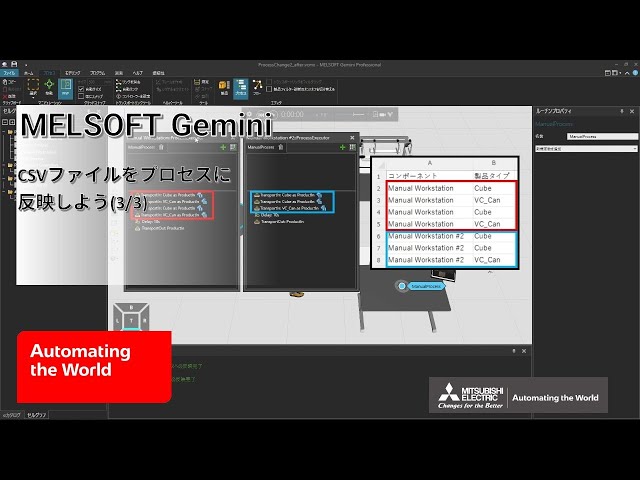
Reflect CSV files into a process (3/3)
(This is a Japanese video. Please display English subtitles.)
How to use a Python script to set product filter product types in Transport In statements from CSV file data Practice file -
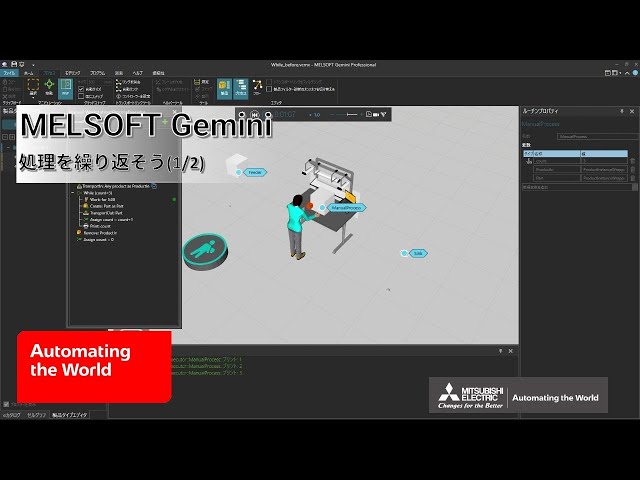
Repeat processing (1/2)
(This is a Japanese video. Please display English subtitles.)
How to repeat processing by setting conditions (WHILE, adding a new variable)
(Related video: Count the number of times a process runs) Practice file -

Repeat processing (2/2)
(This is a Japanese video. Please display English subtitles.)
How to control loop execution (BREAK, CONTINUE) Practice file -
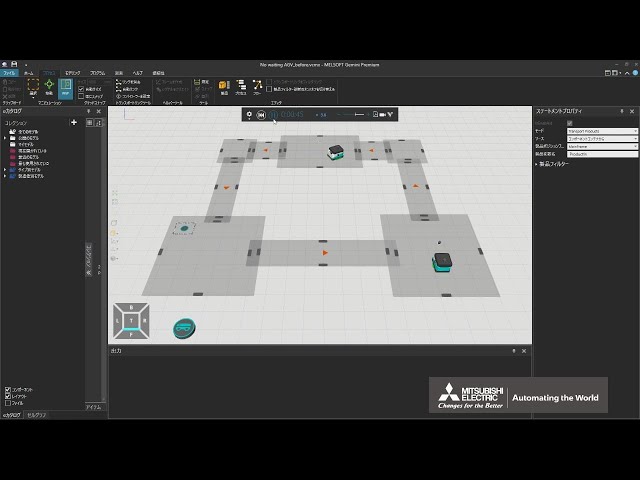
Run multiple AGVs without wait times
(This is a Japanese video. Please display English subtitles.)
How to run multiple AGVs without wait times
(Related video: Let's Learn About Product Destination and Source) Practice file -

Set camera viewpoints for recording
(This is a Japanese video. Please display English subtitles.)
How to set camera viewpoints using the Camera Animator for recording (Related video: Set camera viewpoint for recording using Python) Practice file -
Switch viewpoints using the View Editor
(This is a Japanese video. Please display English subtitles.)
How to save and switch camera viewpoints in the 3D world (Related videos: Set camera viewpoints for recording, Set camera viewpoint for recording using Python) -
Sync timing of multiple workers (1/4)
(This is a Japanese video. Please display English subtitles.)
How to make it look like multiple workers are carrying one product together by transporting dummy products alongside the main product Practice file -
Sync timing of multiple workers (2/4)
(This is a Japanese video. Please display English subtitles.)
How to synchronize the timing of product load completion so multiple workers appear to carry a product together Practice file -

Sync timing of multiple workers (3/4)
(This is a Japanese video. Please display English subtitles.)
How to synchronize the timing of product unload start so multiple workers appear to carry a product together Practice file -

Sync timing of multiple workers (4/4)
(This is a Japanese video. Please display English subtitles.)
How to prevent other tasks from interrupting so multiple workers appear to carry one product together Practice file -
Transport products using a custom cart
(This is a Japanese video. Please display English subtitles.)
How to transport products using an original cart for unloading.
(Attach statement, Detach statement, Product position frame, TransportLocation) Practice file -

Use a Crossing Conveyor
(This is a Japanese video. Please display English subtitles.)
How to use a crossing conveyor that can branch products in four directions -

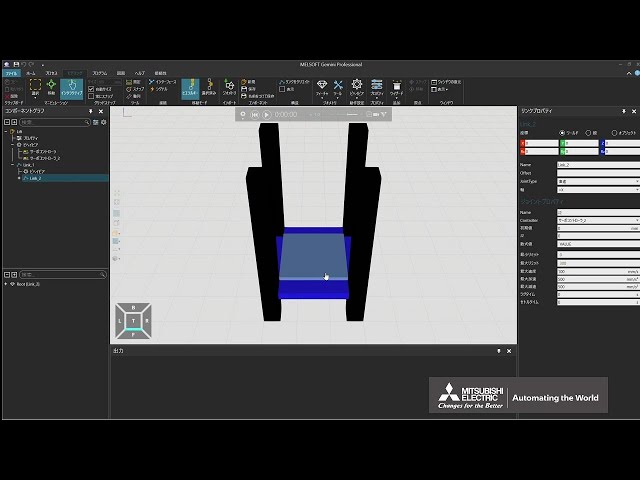
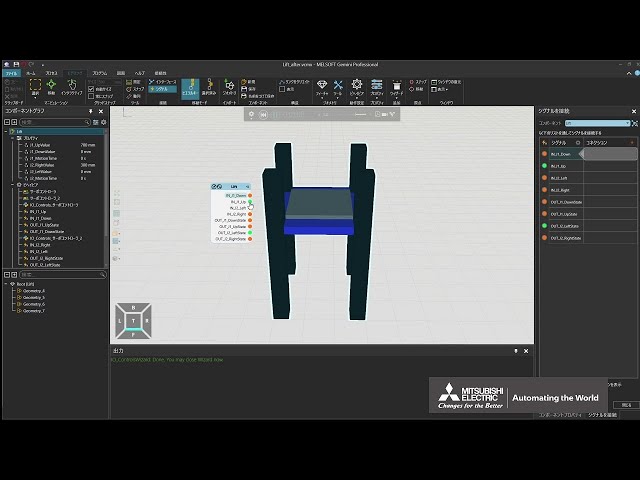
Use a Lift Conveyor
(This is a Japanese video. Please display English subtitles.)
How to use a lift conveyor (moves up and down) and how to attach multiple products to flow them simultaneously (Bundler Point, De-bundler) Practice file -

Use an overhead crane
(This is a Japanese video. Please display English subtitles.)
How to transport products using an overhead crane (Dual Rail Transport Controller, Crane) Practice file -
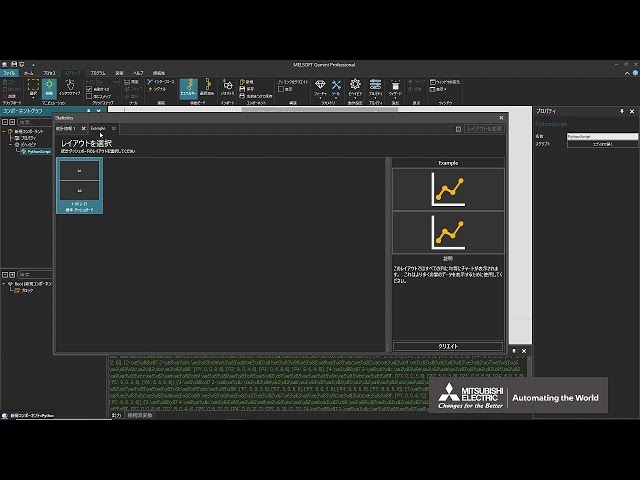
Use template charts in the statistics dashboard
(This is a Japanese video. Please display English subtitles.)
How to use template charts in the statistics dashboard and how to create custom template charts and layouts Practice file -
Use the Transport Link tool
(This is a Japanese video. Please display English subtitles.)
How to bulk delete, auto-create, and change controller assignments for transport links that set product flow Practice file -

Wait in a process until a signal is triggered
(This is a Japanese video. Please display English subtitles.)
How to make a process wait until a signal reaches a specified value (Wait for signal) Practice file -
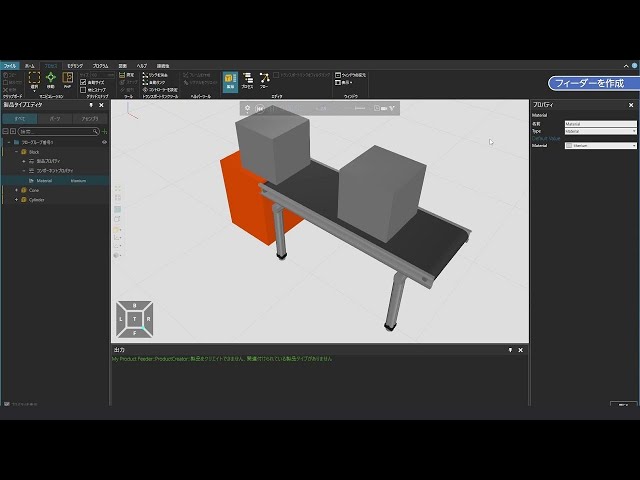
Add components during simulation (1/3)
(This is a Japanese video. Please display English subtitles.)
How to model basic feeders that can create components during simulation
Note: Menu names changed with updates. [Box] → [Block]. [Container] → [Component Container]. Practice file -
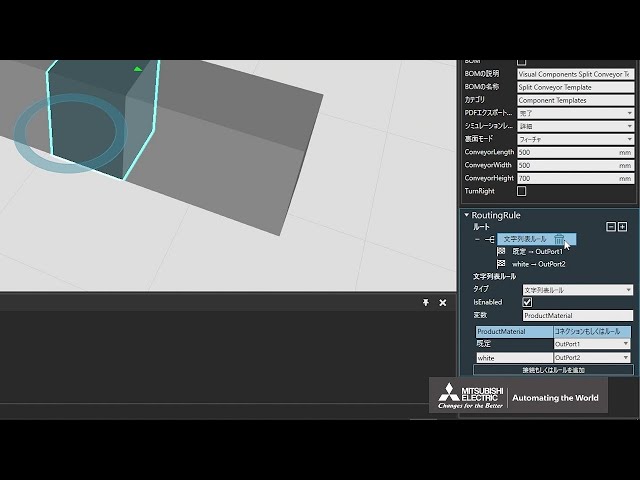
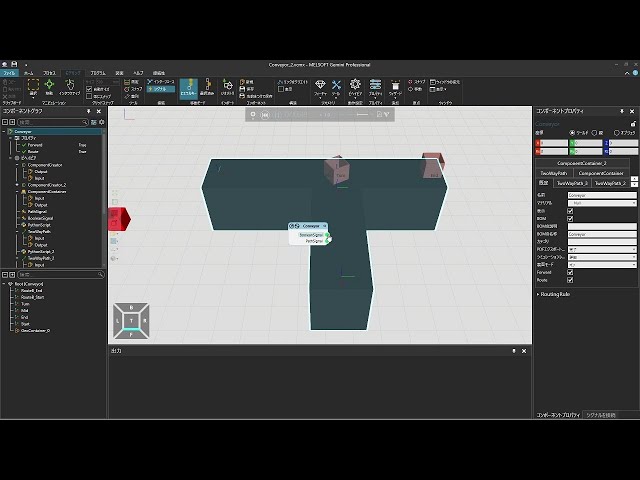
Change conveyor route by product material (1/3)
(This is a Japanese video. Please display English subtitles.)
How to set RoutingRule on a branching conveyor to change routes based on product property values Practice file -

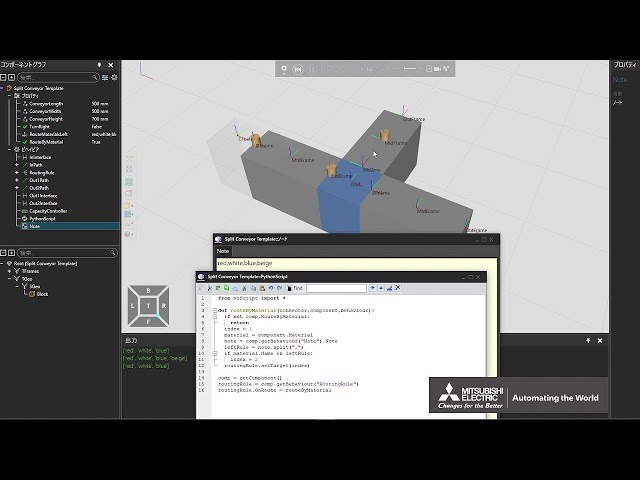
Change conveyor route by product material (2/3)
(This is a Japanese video. Please display English subtitles.)
How to add Python to a branching conveyor to check product material and change the route Practice file -
Change conveyor route by product material (3/3)
(This is a Japanese video. Please display English subtitles.)
How to add Python to a branching conveyor and edit route-change rules via properties or notes Practice file -
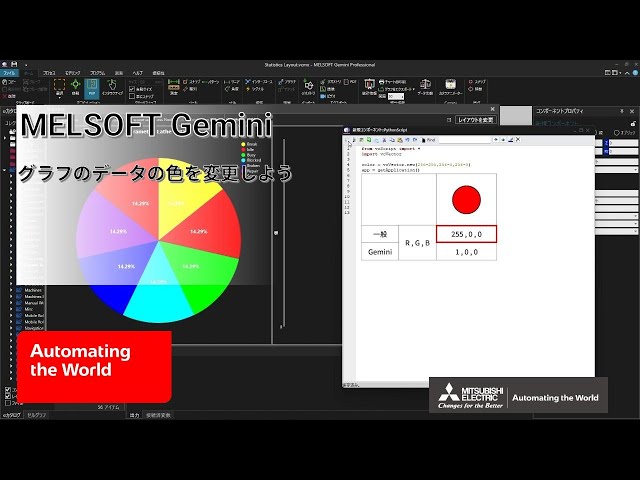
Change graph data colors
(This is a Japanese video. Please display English subtitles.)
How to use Python scripts to change graph data colors in the statistics dashboard (Dashboard, Tabs, Charts, Series, Colors, specify RGB) Practice file -

Change material density
(This is a Japanese video. Please display English subtitles.)
How changing material density affects object mass Practice file -
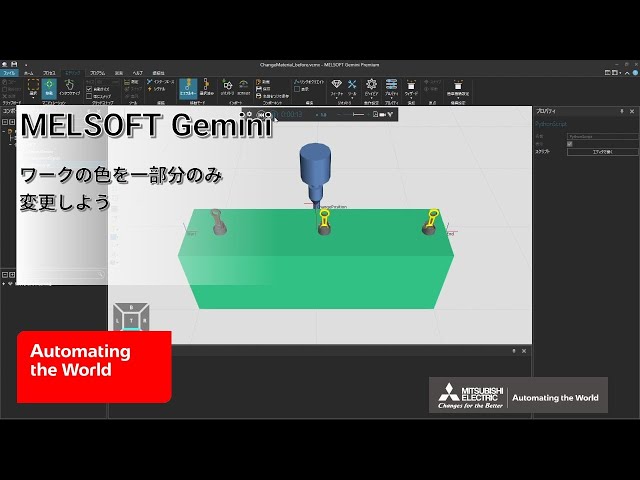
Change part color partially
(This is a Japanese video. Please display English subtitles.)
How to change only part of a workpiece's color using Python
(Related videos: Highlight products to emphasize, Use raycast sensors) Practice file -
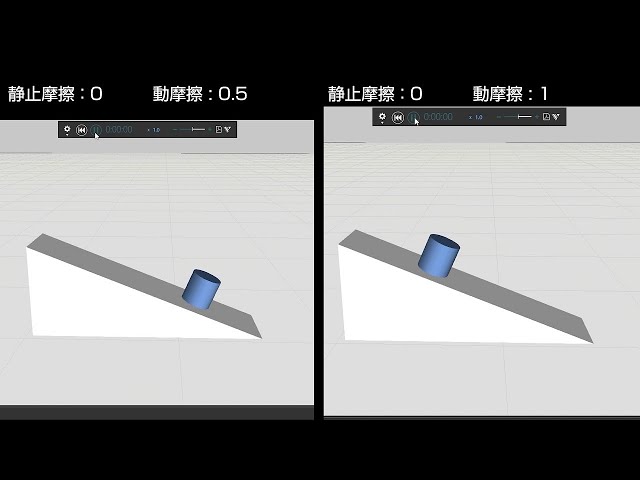
Change product friction (1/2)
(This is a Japanese video. Please display English subtitles.)
How to set static and dynamic friction for physics-affected products Practice file -
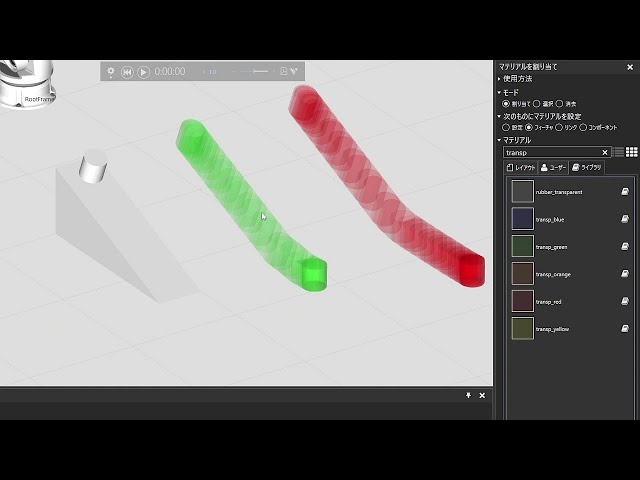
Change product friction (2/2)
(This is a Japanese video. Please display English subtitles.)
How to save trajectories when changing friction for physics-affected products Practice file -
Clear or save output window messages
(This is a Japanese video. Please display English subtitles.)
How to clear or save messages in the Output window using Python -
Combine multiple 3D CAD files
(This is a Japanese video. Please display English subtitles.)
How to import and combine multiple 3D CAD files Practice file -
Connect multiple workpieces and simulate with physics
(This is a Japanese video. Please display English subtitles.)
How to fix physics-enabled components together and configure physical interaction between them Practice file -

Control device display state
(This is a Japanese video. Please display English subtitles.)
How to use Python to hide parts of a device
(Related video: How to Show/Hide Components) Practice file -
Control robots with Python (1/3)
(This is a Japanese video. Please display English subtitles.)
How to control robots with Python for running routines and teaching Practice file -
Control robots with Python (2/3)
(This is a Japanese video. Please display English subtitles.)
How to control robots with Python and integrate sensors to locate, grasp, transport, and release workpieces Practice file -
Control robots with Python (3/3)
(This is a Japanese video. Please display English subtitles.)
How to control robots with Python to record auto-generated teaching into routines and to arrange multiple workpieces Practice file -
Control servos with Python (1/2)
(This is a Japanese video. Please display English subtitles.)
How to control custom device drives with Python (setJointTarget, CalcMotionTime, setMotionTime, move, moveJoint, moveImmediate) Practice file -

Control servos with Python (2/2)
(This is a Japanese video. Please display English subtitles.)
How to control custom device drives with Python and change behavior according to drive state (OnHeartbeat) Practice file -
Control timing of device product transfer
(This is a Japanese video. Please display English subtitles.)
How to use Python to control device product transfer timing using sensors, signals, and conditional branching Practice file -

Create a 2-axis rotary positioner and connect it to a robot (1/2)
(This is a Japanese video. Please display English subtitles.)
How to create an original 2-axis rotary positioner (import 3D CAD, separate moving parts) Practice file -

Create a 2-axis rotary positioner and connect it to a robot (2/2)
(This is a Japanese video. Please display English subtitles.)
How to create an original 2-axis rotary positioner and connect it to a robot (wizard positioner, Robot CompactPositionerAssembly settings) Practice file -

Create a B-contact sensor
(This is a Japanese video. Please display English subtitles.)
How to create a B-contact sensor (raycast sensor, invert sensor signal value via Python script)
(Related videos: Use raycast sensors, use volume sensors, create sensors) Practice file -
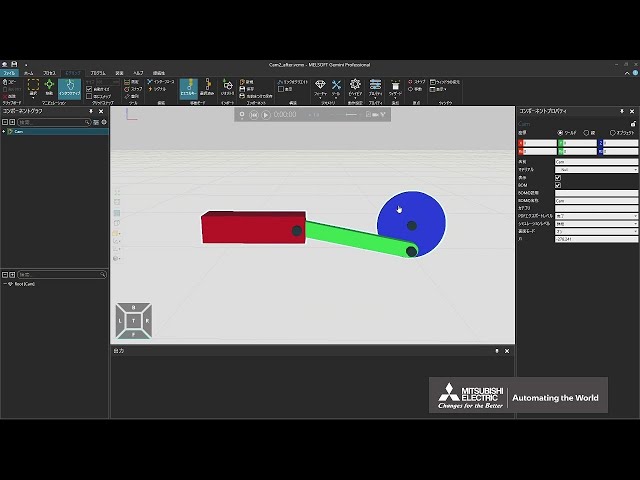
Create a cam mechanism (1/2)
(This is a Japanese video. Please display English subtitles.)
How to create a device with a custom cam mechanism (import 3D CAD, separate moving parts) Practice file -
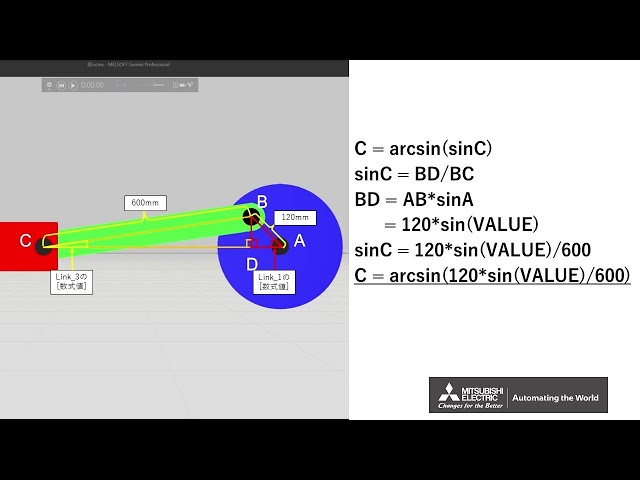
Create a cam mechanism (2/2)
(This is a Japanese video. Please display English subtitles.)
How to create a device with a custom cam mechanism (mechanize, calculate moving part motion using trigonometric functions) Practice file -
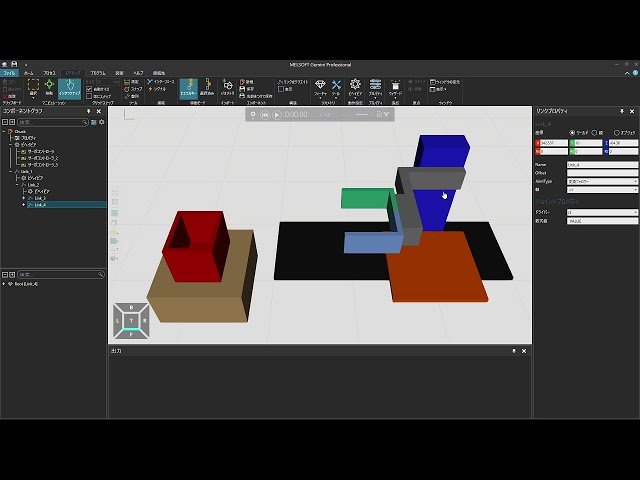
Create a chuck (1/3)
(This is a Japanese video. Please display English subtitles.)
How to import a custom chuck 3D CAD and set moving parts to transfer workpiece between tables Practice file -
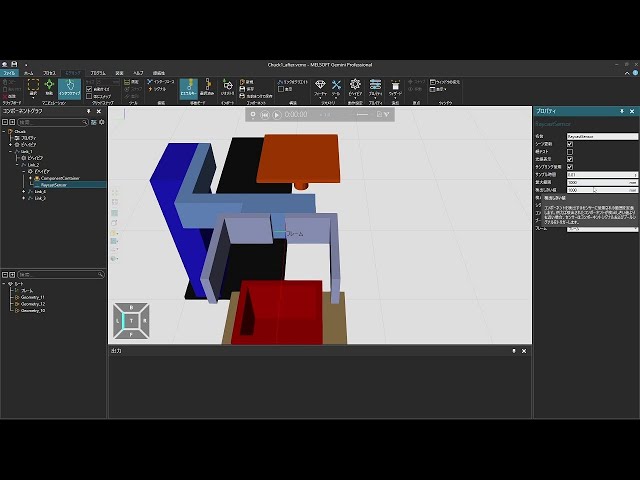
Create a chuck (2/3)
(This is a Japanese video. Please display English subtitles.)
How to set detection for workpieces and container settings for a custom chuck Practice file -
Create a chuck (3/3)
(This is a Japanese video. Please display English subtitles.)
How to control custom chuck workpiece transport using Python scripts Practice file -
Create a custom linear track (1/2)
(This is a Japanese video. Please display English subtitles.)
How to create a custom linear track and allow carts to move along it Practice file -
Create a custom linear track (2/2)
(This is a Japanese video. Please display English subtitles.)
How to create a custom linear track and use robot programs to move robots along it Practice file -
Create a cylinder (1/3)
(This is a Japanese video. Please display English subtitles.)
How to create a custom cylinder
(import 3D CAD, mechanism setup) Practice file -
Create a cylinder (2/3)
(This is a Japanese video. Please display English subtitles.)
How to create a custom cylinder
(action script wizard, grip detection range, release distance, operation programming) Practice file -
Create a cylinder (3/3)
(This is a Japanese video. Please display English subtitles.)
How to create a custom cylinder
(control operation program via Python script) Practice file -
Create a device simulation conveyor (1/3)
(This is a Japanese video. Please display English subtitles.)
How to create multiple workpiece types without using feeders Practice file -
Create a device simulation conveyor (2/3)
(This is a Japanese video. Please display English subtitles.)
How to control product behavior on a conveyor (forward, backward, pause, etc.) Practice file -
Create a device simulation conveyor (3/3)
(This is a Japanese video. Please display English subtitles.)
How to control route branching for where products on a conveyor will flow Practice file -
Create a feeder to understand structure
(This is a Japanese video. Please display English subtitles.)
How to create a custom feeder to understand mechanism settings
Note: From version 1.410, "PM Flow Components" renamed to "Flow Components." Practice file -
Create a lift with the IO Control Wizard (1/2)
(This is a Japanese video. Please display English subtitles.)
How to create an original lift device
(import 3D CAD, mechanism setup) Practice file -
Create a lift with the IO Control Wizard (2/2)
(This is a Japanese video. Please display English subtitles.)
How to create an original lift
(IO Control wizard, signal control) Practice file -
Create a physics-affected conveyor (1/2)
(This is a Japanese video. Please display English subtitles.)
How to configure conveyors where parts fall off the edge Practice file -
Create a physics-affected conveyor (2/2)
(This is a Japanese video. Please display English subtitles.)
How to configure conveyors where parts roll down inclined surfaces under physics Practice file -
Create a physics-affected feeder (1/2)
(This is a Japanese video. Please display English subtitles.)
How to create feeders for parts affected by physical forces Practice file -
Create a physics-affected feeder (2/2)
(This is a Japanese video. Please display English subtitles.)
How to create parts affected by physics and flow them from feeders to conveyors Practice file -
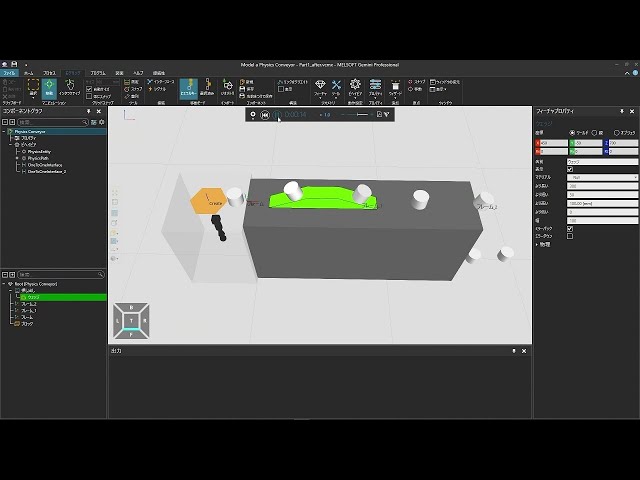
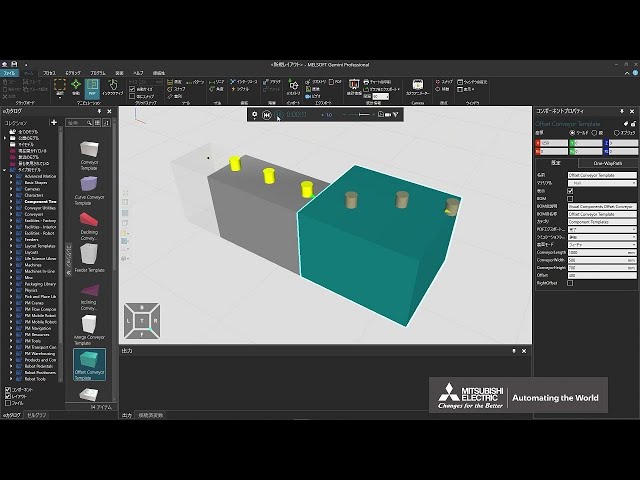
Create a process-modeling conveyor
(This is a Japanese video. Please display English subtitles.)
How to build an original conveyor for process modeling
Note: Menu names changed with updates. [Container] → [Component Container]. Practice file -
Create a pusher (1/4)
(This is a Japanese video. Please display English subtitles.)
How to set the mechanism of a pusher that can push products Practice file -
Create a pusher (2/4)
(This is a Japanese video. Please display English subtitles.)
How to set sensors that detect products for a pusher Practice file -
Create a pusher (3/4)
(This is a Japanese video. Please display English subtitles.)
How to set a Python script to push products with a pusher Practice file -
Create a pusher (4/4)
(This is a Japanese video. Please display English subtitles.)
How to join products that have been pushed by the pusher Practice file -
Create a robot tool and control the robot via PLC to transport products (1/3)
(This is a Japanese video. Please display English subtitles.)
How to create an original robot tool
(import 3D CAD, mechanism setup, motion settings, connect robot tool to robot) Practice file -
Create a robot tool and control the robot via PLC to transport products (2/3)
(This is a Japanese video. Please display English subtitles.)
How to create an original robot tool
(robot teaching) Practice file -
Create a robot tool and control the robot via PLC to transport products (3/3)
(This is a Japanese video. Please display English subtitles.)
How to create an original robot tool
(use the tool to grasp, transport, and release products; control via PLC) Practice file -
Create a robot with horizontal mechanism
(This is a Japanese video. Please display English subtitles.)
How to create a simple linear robot with a horizontal mechanism Practice file -

Create a sensor
(This is a Japanese video. Please display English subtitles.)
How to create an original sensor Practice file -
Create a statistics dashboard (1/2)
(This is a Japanese video. Please display English subtitles.)
How to use Python to add custom row/column layouts to the statistics dashboard
(Related video: How to View Statistics) Practice file -

Create a statistics dashboard (2/2)
(This is a Japanese video. Please display English subtitles.)
How to use an add-on to add custom row/column layouts to the statistics dashboard
(Related video: Use template charts in the statistics dashboard) Practice file -
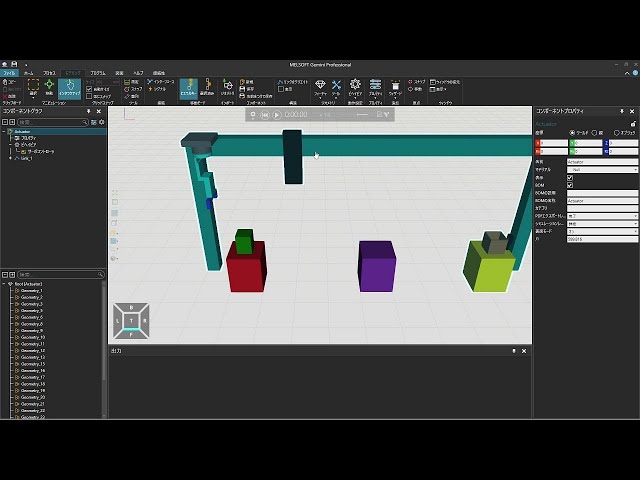
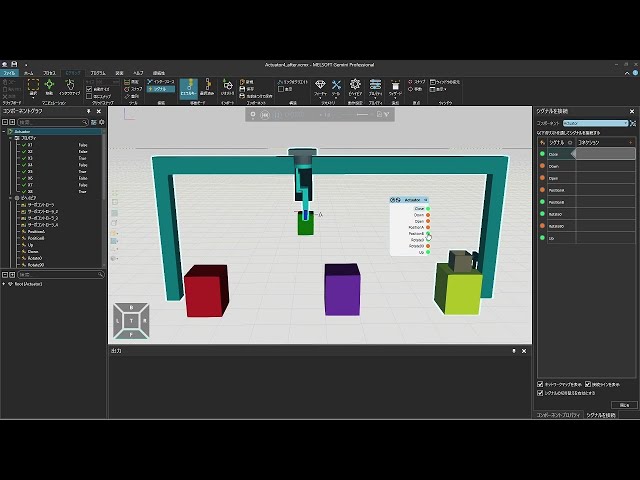
Create an actuator (1/6)
(This is a Japanese video. Please display English subtitles.)
How to import a custom actuator 3D CAD and set a single moving part Practice file -

Create an actuator (2/6)
(This is a Japanese video. Please display English subtitles.)
How to set multiple moving parts for a custom actuator Practice file -

Create an actuator (3/6)
(This is a Japanese video. Please display English subtitles.)
How to detect workpieces for a custom actuator and set containers to store workpieces Practice file -
Create an actuator (4/6)
(This is a Japanese video. Please display English subtitles.)
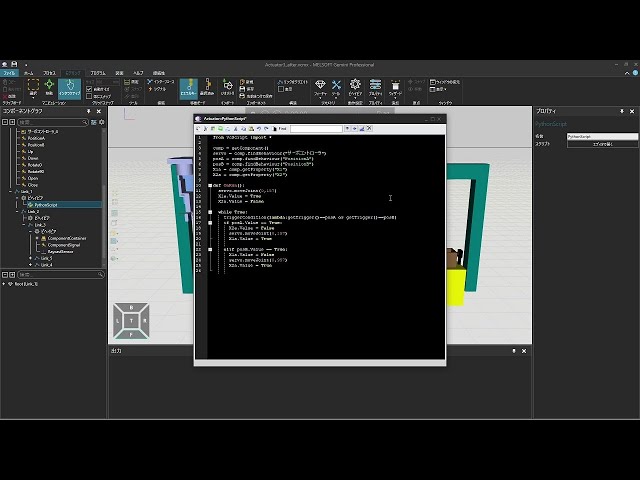
How to control custom actuator moving parts using Python scripts Practice file -
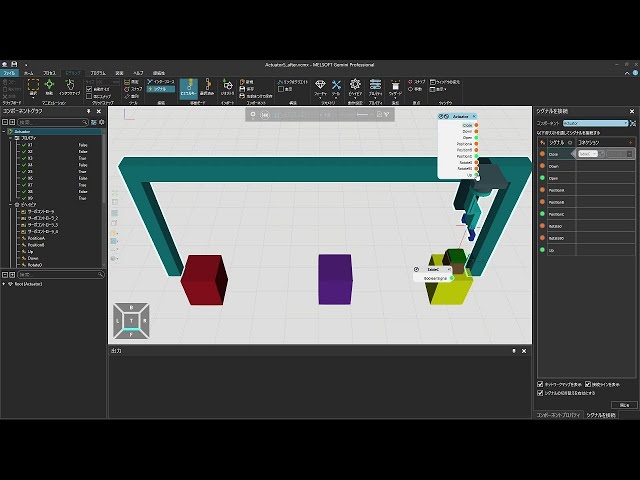
Create an actuator (5/6)
(This is a Japanese video. Please display English subtitles.)
How to control custom actuator workpiece transport using Python scripts Practice file -
Create an actuator (6/6)
(This is a Japanese video. Please display English subtitles.)
How to control operations that join workpieces together using Python scripts on a custom actuator Practice file -

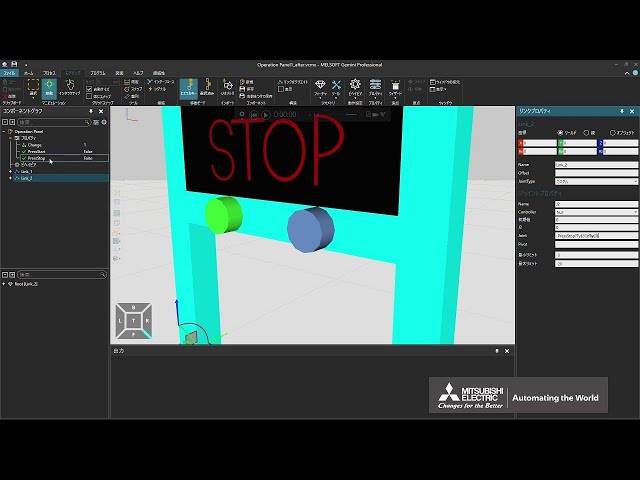
Create an operator panel (1/3)
(This is a Japanese video. Please display English subtitles.)
How to create a custom operator panel (import 3D CAD, make displays switchable dynamically) Practice file -
Create an operator panel (2/3)
(This is a Japanese video. Please display English subtitles.)
How to create a custom operator panel (separate moving parts, make buttons pressable) Practice file -

Create an operator panel (3/3)
(This is a Japanese video. Please display English subtitles.)
How to create a custom operator panel (use Python to control signals when buttons are pressed) Practice file -

Create physics-affected containers
(This is a Japanese video. Please display English subtitles.)
How to create containers (shelves, boxes) that cause workpieces to fall due to physics Practice file -

Create reference and list-type properties
(This is a Japanese video. Please display English subtitles.)
How to create properties that reference component nodes and list-type properties using Python Practice file -

Create reusable Python snippets
(This is a Japanese video. Please display English subtitles.)
How to create reusable Python code snippets -
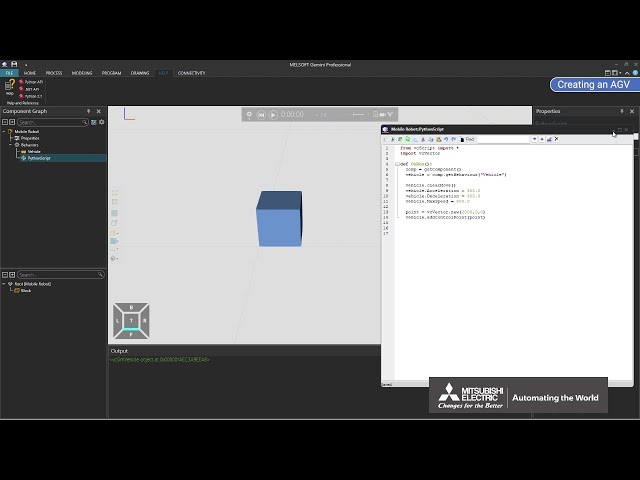
Creating an AGV (Part 1 of 12)
How to create an original AGV and configure the basic settings Practice file -
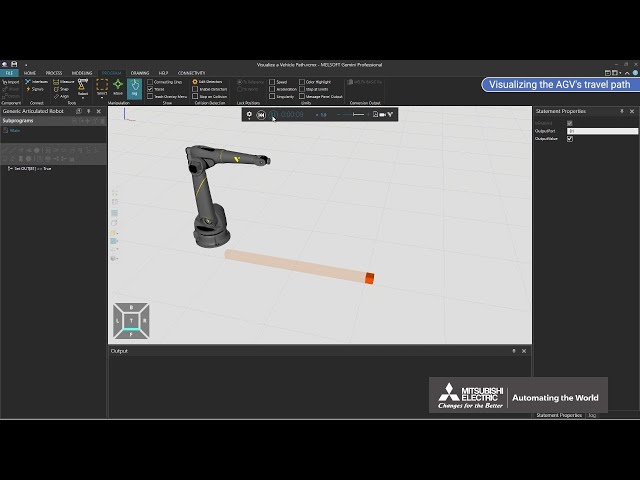
Creating an AGV (Part 2 of 12)
How to visualize the original AGV's path Practice file -

Creating an AGV (Part 3 of 12)
How to operate an original AGV Practice file -

Creating an AGV (Part 4 of 12)
How to interpolate the original AGV's travel path Practice file -

Creating an AGV (Part 5 of 12)
How to read information from an original AGV and control its operation Practice file -

Creating an AGV (Part 6 of 12)
How to rotate an original AGV Practice file -

Creating Components for Process Modeling
How to create an original machine and use it for process modeling Practice file -
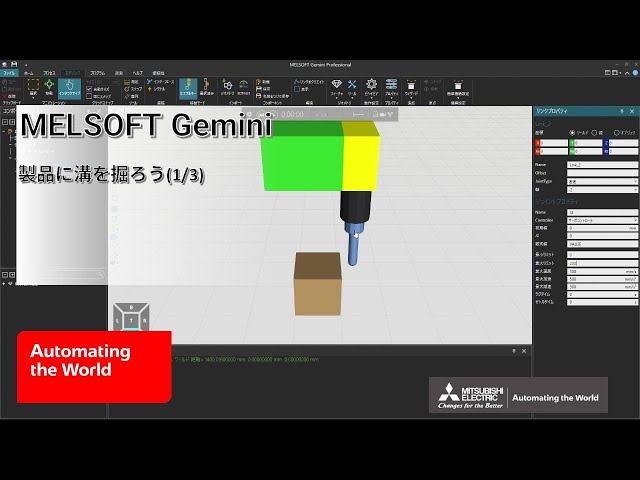
Cut grooves into a product (1/3)
(This is a Japanese video. Please display English subtitles.)
How to import CAD files of the machine and product and set mechanisms for a grooving machine Practice file -

Cut grooves into a product (2/3)
(This is a Japanese video. Please display English subtitles.)
How to control moving parts of the machine with Python signals Practice file -

Cut grooves into a product (3/3)
(This is a Japanese video. Please display English subtitles.)
How to groove a product using a machine controlled by Python
(Related videos: Try merging and punching products, Create sensors) Practice file -

Define quantity and unit for properties
(This is a Japanese video. Please display English subtitles.)
How to create properties that allow specifying quantity and units using Python scripts Practice file -

Drill holes in a product (1/5)
(This is a Japanese video. Please display English subtitles.)
How to set up the mechanism of a drilling machine that drills holes in products Practice file -
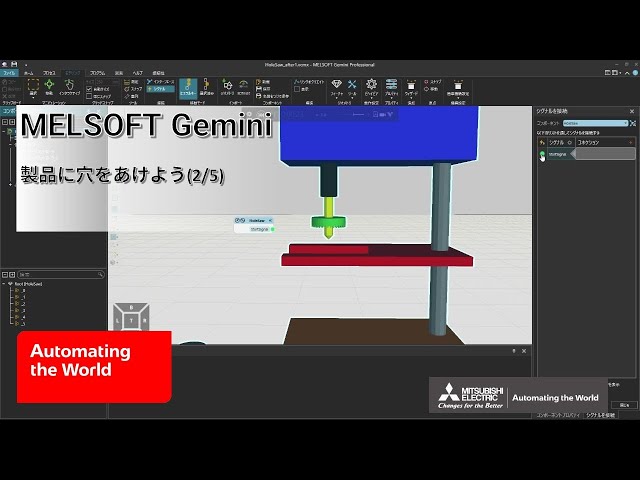
Drill holes in a product (2/5)
(This is a Japanese video. Please display English subtitles.)
How to control the moving parts of the drilling machine with signals Practice file -

Drill holes in a product (3/5)
(This is a Japanese video. Please display English subtitles.)
How to control product appearance with properties (transform, rebuild, conditional operators)
(Related video: Try merging and punching products) Practice file -

Drill holes in a product (4/5)
(This is a Japanese video. Please display English subtitles.)
How to generate products and move them along a specified path (Component Creator, Component Container, One Way Path) Practice file -

Drill holes in a product (5/5)
(This is a Japanese video. Please display English subtitles.)
How to control hole depth based on the current value of a moving part Practice file -

Export/import variable pair lists
(This is a Japanese video. Please display English subtitles.)
How to export and import lists of variable pairs for PLC communication and set variable pairs in bulk Practice file -
Highlight products to emphasize
(This is a Japanese video. Please display English subtitles.)
How to highlight products (change color, emphasize) for display Practice file -
Import mechanical information from 3D CAD
(This is a Japanese video. Please display English subtitles.)
How to import mechanical information from 3D CAD files while retaining it Practice file -
Let's build a robotic tool to transport products (Part 1 of 2)
How to build an original robotic tool (importing 3D CAD files, setting mechanisms, configuring operations) Practice file -
Let's build a robotic tool to transport products (Part 2 of 2)
How to build an original robotic tool (connecting the robotic tool to the robot, gripping, transporting, and releasing products with the robotic tool) Practice file -

Let's define the repulsion when components collide
How to define the rebound force and elasticity of a physical component Practice file -

Let's delete the work in the machine simulation
How to delete a workpiece in a machine simulation Practice file -
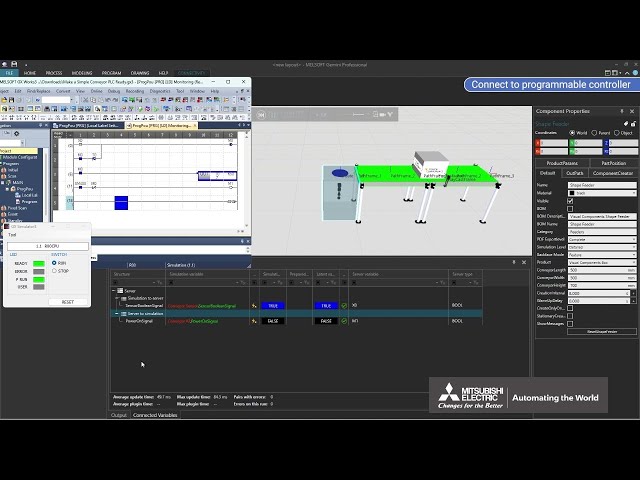
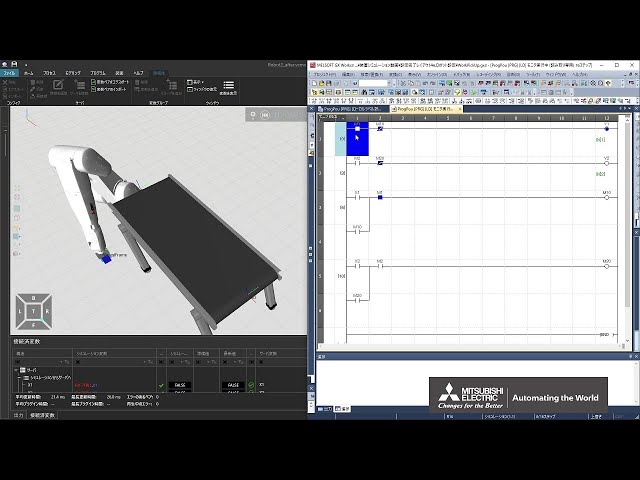
Let's make a conveyor and connect it to the sequencer
How to make an original conveyor and simulate it in conjunction with the programmable controller Practice file -

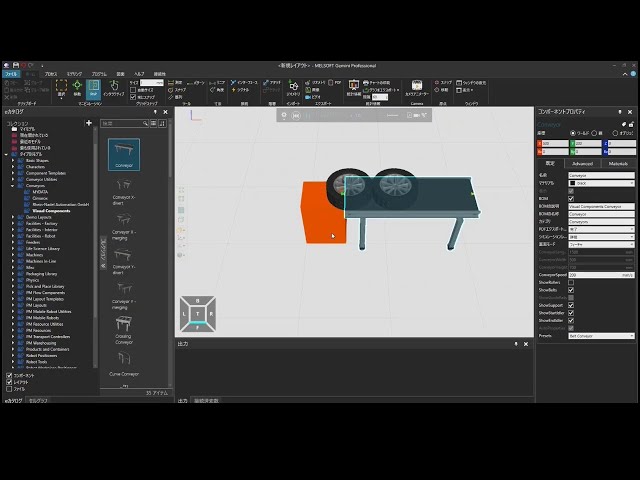
Let's make a conveyor using a wizard
How to make an original conveyor using a wizard Practice file -
Let's make a curved conveyor
How to make an original curved conveyor Practice file -

Let's make a Turn conveyor
How to make an original turn conveyor Practice file -

Let's save the components
How to save a component (such as a machine and workpiece) created in Gemini and set it in the original eCatalog -
Merge and punch products
(This is a Japanese video. Please display English subtitles.)
How to use boolean operations to merge and punch products Practice file -
Model parts affected by physical forces and collisions
(This is a Japanese video. Please display English subtitles.)
How to create parts that respond to physical forces and collisions -

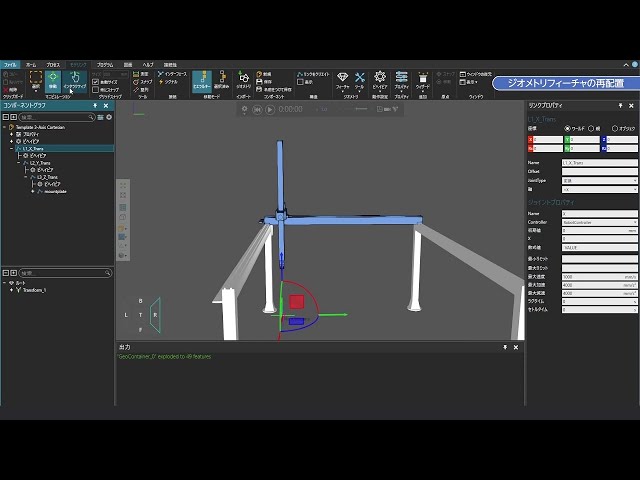
Move a moving part on an angled axis
(This is a Japanese video. Please display English subtitles.)
How to set an oblique axis for a moving part and use it as a reference for linear or rotational motion (Move Mode, Custom, Joint, Pivot, Pos, WPR) Practice file -
Optimize simulation performance
(This is a Japanese video. Please display English subtitles.)
Important points and helpful features for improving simulation performance when creating layouts Practice file -
Push multiple workpieces at once with a pusher (1/3)
(This is a Japanese video. Please display English subtitles.)
How to create a custom pusher capable of pushing multiple workpieces at once (import 3D CAD, separate moving parts, mechanize) Practice file -
Push multiple workpieces at once with a pusher (2/3)
(This is a Japanese video. Please display English subtitles.)
How to create a custom pusher capable of pushing multiple workpieces at once (interference detectors to detect workpieces, container to store them) Practice file -
Push multiple workpieces at once with a pusher (3/3)
(This is a Japanese video. Please display English subtitles.)
How to create a custom pusher capable of pushing multiple workpieces at once (Python script to push detected workpieces) Practice file -

Read/write CSV files (1/2)
(This is a Japanese video. Please display English subtitles.)
How to use Python script snippets to read and write CSV files (open, reader, writer) Practice file -

Read/write CSV files (2/2)
(This is a Japanese video. Please display English subtitles.)
How to use Python scripts to reflect read CSV files in the simulation and write simulation results to CSV files (open, reader, writer) Practice file -

Registering Your Original Model in the eCatalog
How to register original models of machines and layouts in eCatalog
Related video: Let's save the components Practice file -

Replace product before/after processing
(This is a Japanese video. Please display English subtitles.)
How to use Python to replace a product with another component after processing by a device Practice file -
Run Python when properties or signals change
(This is a Japanese video. Please display English subtitles.)
How to execute Python scripts when events like property or signal value changes occur Practice file -
Select component nodes to check settings
(This is a Japanese video. Please display English subtitles.)
How to select nodes/links when creating custom devices and components -

Set actions when a property button is clicked
(This is a Japanese video. Please display English subtitles.)
How to dynamically create component property buttons with Python and set their click behavior via Python Practice file -
Set camera viewpoints for recording using Python
(This is a Japanese video. Please display English subtitles.)
How to set camera animator viewpoints for recording using Python (Related video: Set camera viewpoints for recording) Practice file -

Set input rules for properties
(This is a Japanese video. Please display English subtitles.)
How to create properties with constraints like value ranges using Python scripts -
Simplify 3D CAD models
(This is a Japanese video. Please display English subtitles.)
How to simplify imported 3D CAD to reduce system load
Note: Since version 1.410, the folder is "Documents\MITSUBISHI\Gemini\●.●●●\My Commands\Python 2".
(Related video: Optimize simulation performance) Practice file -
Solve Python errors
(This is a Japanese video. Please display English subtitles.)
How to resolve errors (compile/runtime) and exceptions when using Python scripts Practice file -
Switch between multiple geometries
(This is a Japanese video. Please display English subtitles.)
How to make a custom box appearance switchable based on conditions Practice file -
Use a component path sensor
(This is a Japanese video. Please display English subtitles.)
How to use a component path sensor that detects only products moving along a conveyor
(Related videos: Use raycast sensors, use volume sensors, Let's make a conveyor using a wizard, use two-way paths) Practice file -
Use a raycast sensor
(This is a Japanese video. Please display English subtitles.)
How to represent optical or laser sensors Practice file -
Use a volume sensor
(This is a Japanese video. Please display English subtitles.)
How to represent human-presence sensors by setting detection surfaces in space Practice file -

Use damping (1/3)
(This is a Japanese video. Please display English subtitles.)
How to use linear and angular damping in physics to set behavior during vibrations Practice file -
Use damping (2/3)
(This is a Japanese video. Please display English subtitles.)
How to set position and velocity iterations in the physics iterative solver to control vibration behavior Practice file -
Use damping (3/3)
(This is a Japanese video. Please display English subtitles.)
How to use damping in parts of a device to set behavior when parts collide Practice file -
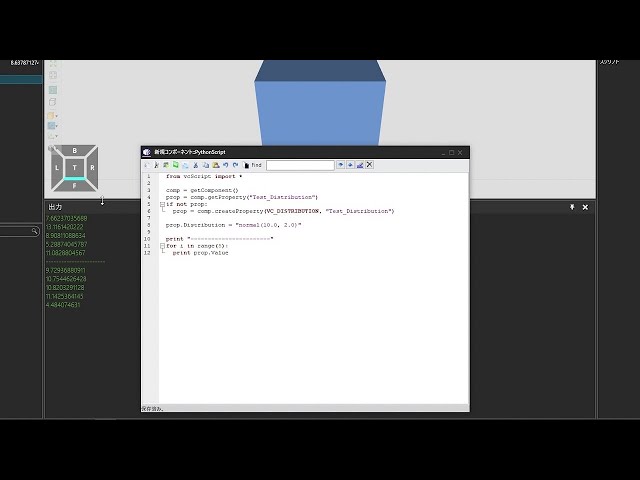
Use normal distribution to generate pseudo-random numbers
(This is a Japanese video. Please display English subtitles.)
How to create a distribution property and use a normal distribution to make pseudo-random numbers
How to change the seed value using Python -
Use the Wizard
(This is a Japanese video. Please display English subtitles.)
How to auto-generate motion settings for an original device
Note: Menu names changed with updates. [Work Library] removed. From version 1.410, "PM Flow Components" category renamed to "Flow Components." Practice file -
Use two-way paths
(This is a Japanese video. Please display English subtitles.)
How to configure routes where products can flow bidirectionally on a custom device or conveyor Practice file -
Add conditions to robot motions
(This is a Japanese video. Please display English subtitles.)
How to add conditions to robot motions Practice file -
Add statements via overlay menus
(This is a Japanese video. Please display English subtitles.)
How to use external Python files to add overlay menu items and statements to robot programs Practice file -
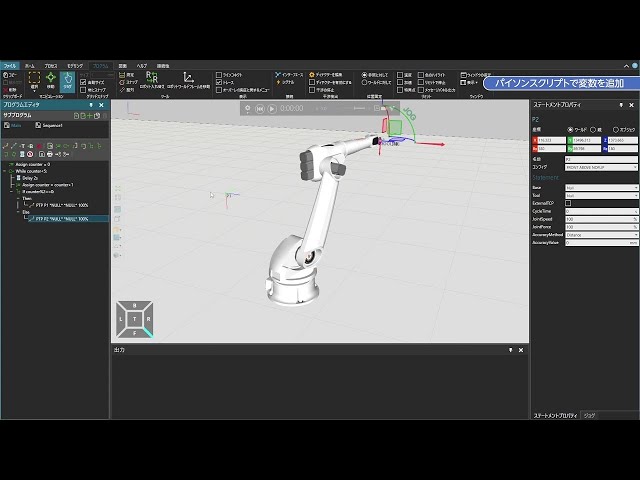
Add variables to robot programs
(This is a Japanese video. Please display English subtitles.)
How to add variables to robot programs Practice file -

Attach and configure tools on a robot
(This is a Japanese video. Please display English subtitles.)
How to mount tools on a robot arm tip and set them up Practice file -
Automatically resolve interferences during robot program execution
(This is a Japanese video. Please display English subtitles.)
Available from Gemini 1.48.
How to generate collision-free paths for robot programs (resolve via-paths) Practice file -
Change the number of workpieces a robot transports
(This is a Japanese video. Please display English subtitles.)
How to change the number of workpieces a robot transports during simulation (multigrasp, volume size detection, display detected volume)
(Related video: Grasp multiple workpieces simultaneously with a robot) Practice file -
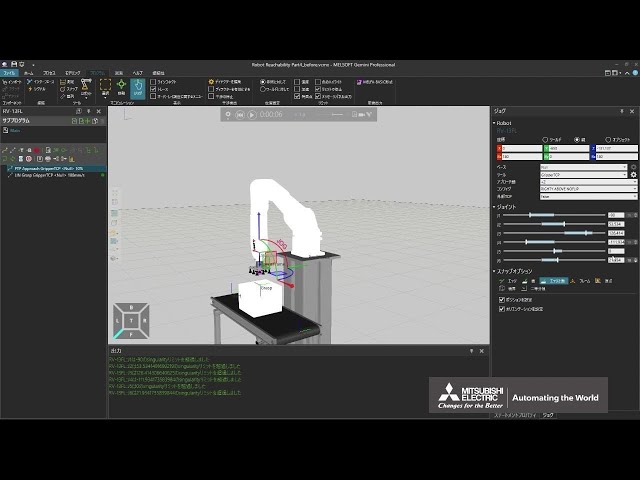
Check robot reach (1/5)
(This is a Japanese video. Please display English subtitles.)
How to interface a robot with a positioner and check the reachable area of the positioner Practice file -
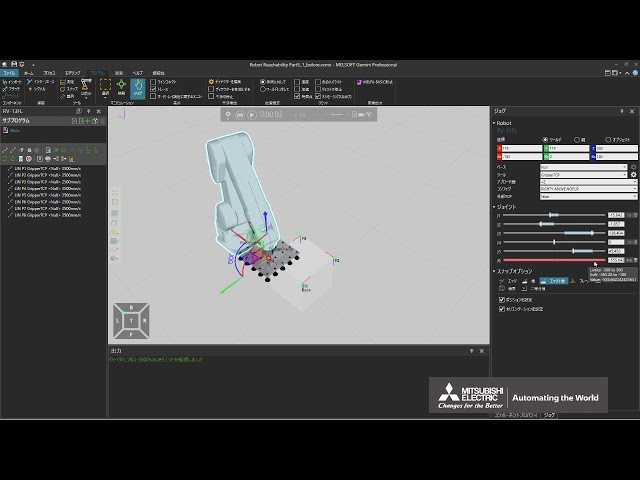
Check robot reach (2/5)
(This is a Japanese video. Please display English subtitles.)
How to visualize the robot workspace and verify reach to a positioner Practice file -
Check robot reach (3/5)
(This is a Japanese video. Please display English subtitles.)
How to move robot joints and confirm the robot can reach a positioner Practice file -
Check robot reach (4/5)
(This is a Japanese video. Please display English subtitles.)
How to avoid robot singularities Practice file -
Check robot reach (5/5)
(This is a Japanese video. Please display English subtitles.)
How to handle when a robot joint exceeds its limits Practice file -
Configure robot motion with if statements
(This is a Japanese video. Please display English subtitles.)
How to add if statements to robot motions for conditional branching Practice file -

Configure robot settings
(This is a Japanese video. Please display English subtitles.)
How to perform robot teaching Practice file -

Connect external axes to a robot
(This is a Japanese video. Please display English subtitles.)
How to connect external axes to a robot and control their movements Practice file -
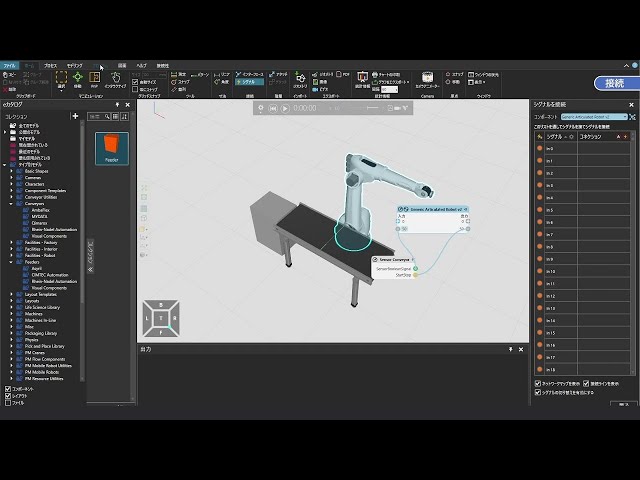
Connect signals to a robot (1/2)
(This is a Japanese video. Please display English subtitles.)
How to connect sensors and conveyor signals to a robot (Part 1 of 2) Practice file -
Connect signals to a robot (2/2)
(This is a Japanese video. Please display English subtitles.)
How to connect sensors and conveyor signals to a robot (Part 2 of 2) Practice file -
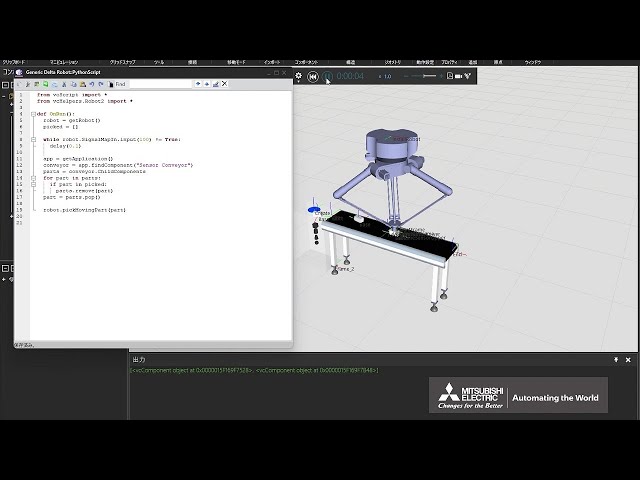
Control robots with Python to align products (1/2)
(This is a Japanese video. Please display English subtitles.)
How to use Python to control a robot to pick up moving parts on a conveyor (pickMovingPart)
(Related videos: Write robot programs in Python, Control robots with Python (2/3)) Practice file -
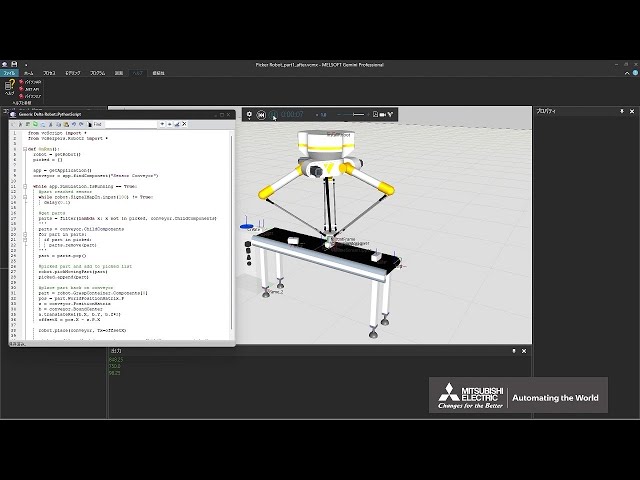
Control robots with Python to align products (2/2)
(This is a Japanese video. Please display English subtitles.)
How to use Python to control a robot to reorient parts and place them on a conveyor (place)
(Related videos: Write robot programs in Python, Control robots with Python (2/3)) Practice file -
Delay robot motion
(This is a Japanese video. Please display English subtitles.)
How to insert delays so the robot does not move for a specified time interval Practice file -
Detect robot collisions
(This is a Japanese video. Please display English subtitles.)
How to detect interference between a robot and peripheral equipment Practice file -
Display stats using robot programs (1/2)
(This is a Japanese video. Please display English subtitles.)
How to use ElseIf in robot motion branching and how to configure statistics Practice file -
Display stats using robot programs (2/2)
(This is a Japanese video. Please display English subtitles.)
How to configure robot operating status statistics and display graphs Practice file -
Do pick & place with a robot
(This is a Japanese video. Please display English subtitles.)
How to set up robot grasp and release actions Practice file -
Export and import robot programs
(This is a Japanese video. Please display English subtitles.)
How to export robot programs in XML format and import them into another robot Practice file -

Export Mitsubishi robot programs
(This is a Japanese video. Please display English subtitles.)
How to teach robot movements in Gemini and convert/export them to MELFA-BASIC format for execution with RT ToolBox3 Practice file -
Grasp multiple workpieces simultaneously with a robot
(This is a Japanese video. Please display English subtitles.)
How to have a robot grasp multiple parts at once Practice file -
Integrate multiple robots and PLCs
(This is a Japanese video. Please display English subtitles.)
How to integrate multiple robots with RT ToolBox3 and multiple PLCs with GX Works3
(Related videos: Integrate with RT ToolBox3, Let's make a conveyor and connect it to the sequencer) Practice file -
Integrate with RT ToolBox3
(This is a Japanese video. Please display English subtitles.)
How to integrate programs taught in RT ToolBox3 to control robots Practice file -

Learn About Robot Settings
(This is a Japanese video. Please display English subtitles.)
How to Set Robot Component Properties
(Related Videos: Learn basic robot configuration, How to Control Robots Using a Controller (Part 1 of 3)~(Part 3 of 3), Learn about assemblies, Let's use the assembly function (1/3)~(3/3), How to Create Assemblies, Let's assemble a product using multiple parts (1/3)~(3/3), Attach and Configure Tools on a Robot, Creating an AGV (Part 2 of 12), Check the Robot's Reach Range (2/5)) -
Learn basic robot configuration
(This is a Japanese video. Please display English subtitles.)
Basic settings such as robot teaching
(Related videos: Do pick & place with a robot, Replace a robot, Attach and configure robot tools, Create AGVs (2/12), Check robot reach (2/5)) Practice file -
Loop robot programs using While
(This is a Japanese video. Please display English subtitles.)
How to use While to loop robot programs to repeat the same motions Practice file -
Move robot joints with Python (1/2)
(This is a Japanese video. Please display English subtitles.)
How to move robot joints and external axes (rails, robot tools) with Python (Joints, ExternalController) Practice file -
Move robot joints with Python (2/2)
(This is a Japanese video. Please display English subtitles.)
How to move robot joints and external axes with Python (Dof, findNode, Children) Practice file -

Paint products with a robot
(This is a Japanese video. Please display English subtitles.)
A Gemini Premium feature.
How to attach a Paint Gun to a robot and paint a plate Practice file -
Place a product on a moving product (1/2)
(This is a Japanese video. Please display English subtitles.)
Explanation on how to pick up a workpiece flowing on a conveyor with Python and place another product on top
(Related videos: Write robot programs in Python, Control robots with Python to align products) Practice file -
Place a product on a moving product (2/2)
(This is a Japanese video. Please display English subtitles.)
Explanation on how to pick up a workpiece flowing on a conveyor with Python and stack it on the next flowing workpiece
(Related videos: Write robot programs in Python, Control robots with Python to align products) Practice file -
Plan and track robot motion paths
(This is a Japanese video. Please display English subtitles.)
How to plan robot motion paths and track them Practice file -

Read robot programs (1/3)
(This is a Japanese video. Please display English subtitles.)
How to read robot programs using Python (Robot Executor, Main routine statements)
(Related videos: Control robots with Python (1/3), (2/3), (3/3)) Practice file -

Read robot programs (2/3)
(This is a Japanese video. Please display English subtitles.)
How to read all statements of robot programs using Python
(Related videos: Control robots with Python (1/3), (2/3), (3/3)) Practice file -

Read robot programs (3/3)
(This is a Japanese video. Please display English subtitles.)
How to read motion statements from robot programs using Python and save source code as a .py file
(Related videos: Control robots with Python (1/3), (2/3), (3/3)) Practice file -
Replace a robot
(This is a Japanese video. Please display English subtitles.)
How to replace a taught robot with another model Practice file -
Stack workpieces with a robot
(This is a Japanese video. Please display English subtitles.)
How to stack parts with a robot Practice file -

Understand robot gravity properties
(This is a Japanese video. Please display English subtitles.)
How to set gravity direction when a robot releases parts Practice file -

Use a process handler to control robots
(This is a Japanese video. Please display English subtitles.)
How to control robots using process handlers and Python scripts Practice file -

Use an indexing table (1/2)
(This is a Japanese video. Please display English subtitles.)
How to send values from a robot to indexing table signals to control rotation (Indexing Table) Practice file -

Use an indexing table (2/2)
(This is a Japanese video. Please display English subtitles.)
How to have a robot place parts in sync with an indexing table's rotation (Indexing Table) Practice file -
Use BASEDEF statements in robot programs
(This is a Japanese video. Please display English subtitles.)
How to change the robot motion center position setting when stacking parts, etc. Practice file -
Use comments and prints in robot programs
(This is a Japanese video. Please display English subtitles.)
How to add annotations to robot programs and output messages during simulation Practice file -

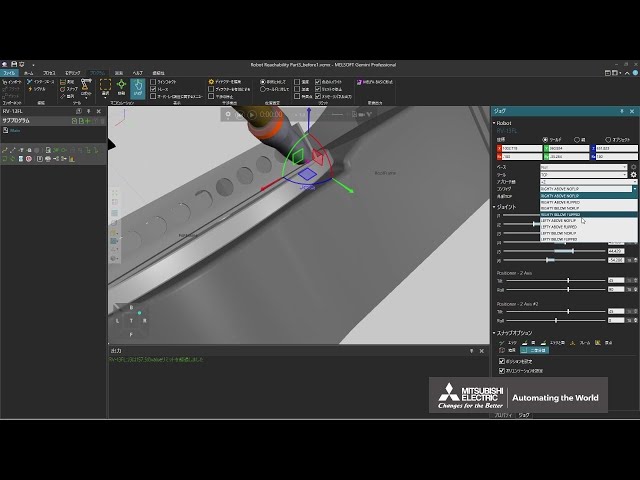
Use external TCP on a robot
(This is a Japanese video. Please display English subtitles.)
How to use the center point of an external tool attached to the robot arm for teaching Practice file -

Use SYNC statements in robot programs
(This is a Japanese video. Please display English subtitles.)
How to synchronize the execution of a robot program with other robot programs Practice file -
Use TOOLDEF statements in robot programs
(This is a Japanese video. Please display English subtitles.)
How to change the tool center point setting dynamically, e.g., when switching robot tools during simulation -
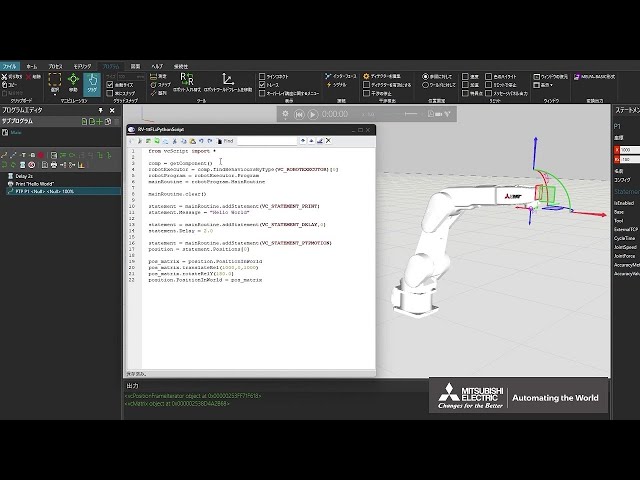
Write robot programs in Python (1/2)
(This is a Japanese video. Please display English subtitles.)
How to control a robot using Python to move it (VC_ROBOTEXECUTOR)
(Related video: Control robots with Python (1/3)) Practice file -
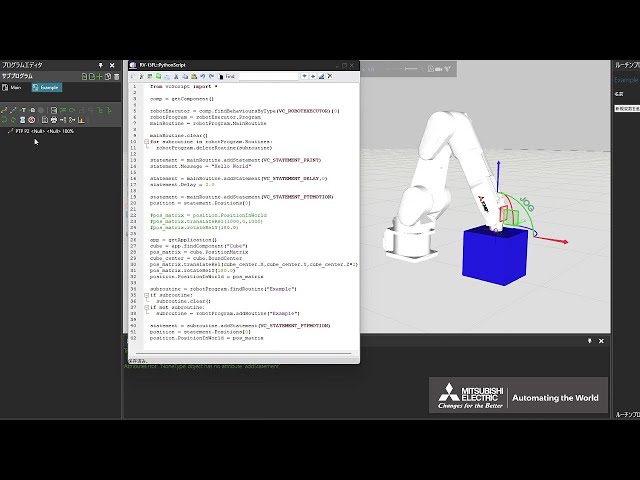
Write robot programs in Python (2/2)
(This is a Japanese video. Please display English subtitles.)
How to control a robot using Python and create subroutines
(Related video: Control robots with Python (1/3)) Practice file