Motion control board Features

MR-EM441G

Features
Motion control board MR-EM441G is a personal computer embedded type servo system controller for controlling servo amplifier MR-J5-G.
Connected to the PCI Express ® extended slot of an industrial personal computer, MR-EM441G realizes fast and accurate motion control.
High-Speed, High-Precision Motion Control
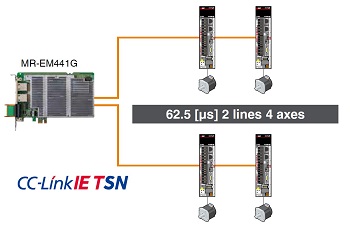
62.5 μs/4-axis control *1, *2
MR-EM441G enables 4-axis control with a minimum operation cycle of 62.5 μs.
Optimum for high-speed processing of the head part.
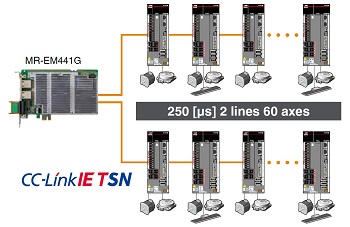
250 μs/60-axis control *3
MR-EM441G enables 60-axis control with a minimum operation cycle of 250 μs.
Cycle time is shortened even for multi-axis equipment.
- *1: When executing a trapezoidal command for all axes in the high-speed operation mode.
- *2: When the operation cycle is 62.5 μs, some functions are not available.
- *3: When connecting only MR-J5W_-G and executing a trapezoidal command for all axes in the high-speed operation mode.
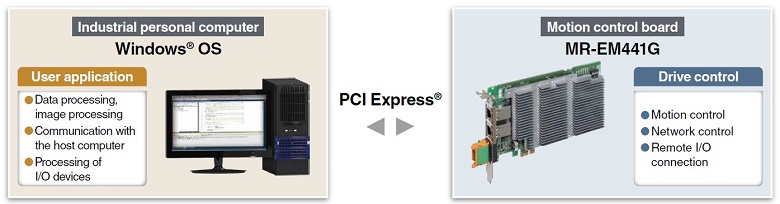
Load Distribution with a PC and a Motion Control Board
MR-EM441G has a built-in high-performance CPU and performs complicated and high-speed motion control.
Therefore, even when the CPU of the PC is heavily loaded with a huge amount of data processing, the motor operation of MR-EM441G will not be affected, achieving high-speed and high-precision positioning.
Functions
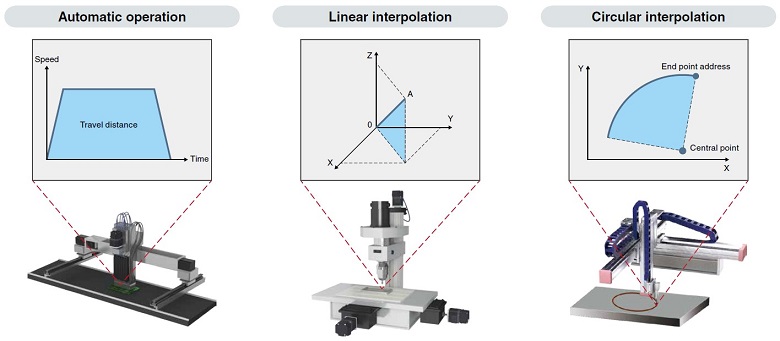
Positioning Control
Positioning data such as speed and travel distance are set to each point, and positioning control is executed from the start point No. to the end point No.
Use the motion API for setting the point data and starting operations.
In the high-speed operation mode, there are restrictions on the combinations of the linear interpolation group, circular interpolation group, and tandem operation group.
Application Functions
Jerk ratio acceleration/deceleration
Set a section where acceleration rate changes smoothly and a section where the maximum acceleration rate is maintained.
This reduces the total acceleration time without losing smoothness.
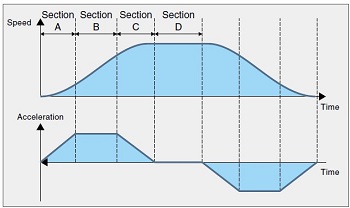
- Section A : Acceleration rate changes smoothly
- Section B : The maximum acceleration rate is maintained
- Section C : Acceleration rate changes smoothly
- Section D : Constant speed
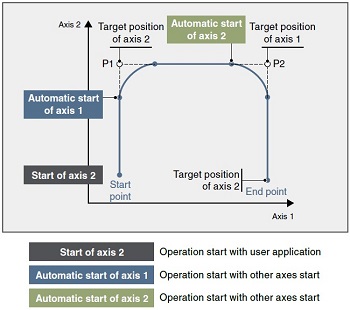
Other axes start
Other axes start is a function that is started by MR-EM441G internally, not by a user application.
Operation of other axes can be started at a specified position of the self axis, reducing cycle time.
Startup conditions of other axes and their operation patterns must be set in advance.
Output signals can also be turned ON or OFF based on the other axes start condition.
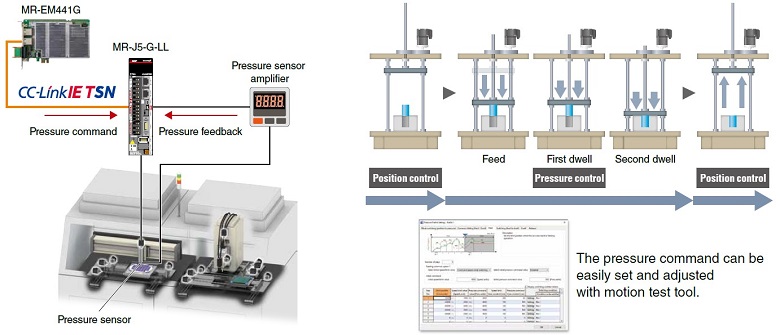
Pressure control
Pressure control is performed so that the pressure command and the pressure sensor value are matched, enabling the pressure to be kept constant even while the load is changing.
Combined with an MR-J5-G-LL pressure control compatible servo amplifier, MR-EM441G can perform feed, dwell, and pressure release operations, achieving advanced pressure control.
Up to 16 axes can execute pressure control simultaneously.
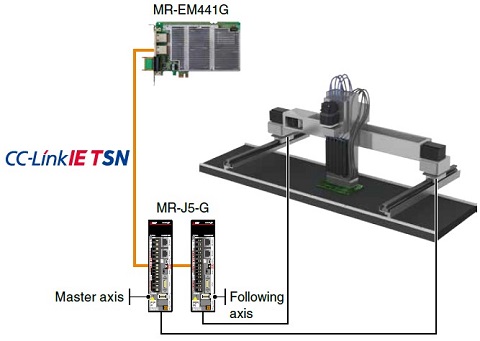
Tandem operation
Tandem operation is a function that controls two axes (master axis and following axis) set in the tandem operation group to perform the exact same positioning operation.
It is used when two mechanically coupled motors drive a single machine, such as gantry systems.
Point data settings and operation start are performed on the master axis.
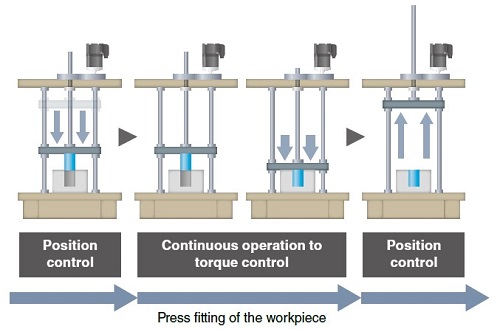
Continuous operation to torque control
The axes are controlled to run at the constant torque by following the torque command while the current position is being tracked.
The position control can be switched smoothly to the torque control without stopping the servo motor.
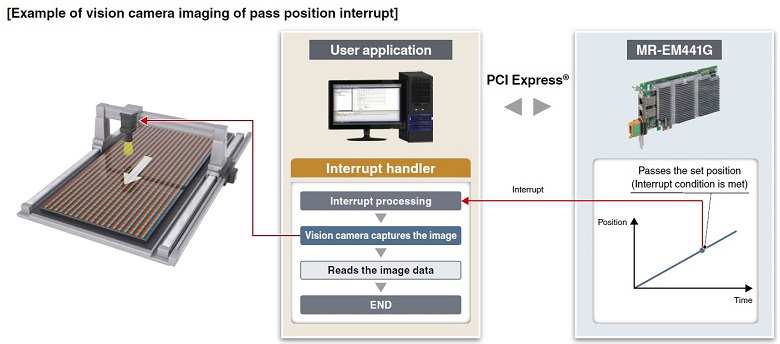
Pass position interrupt
Pass position interrupt is a function that generates interrupts to the industrial personal computer when axes pass the specified position.
In addition to interrupts at the rising edge detection of signals such as operation completion, user applications that utilize interrupts by position can be configured.
Development Environment
MELSOFT EM Motion SDK
MELSOFT EM Motion SDK is a software development kit that supports Motion control boards from parameter settings, debug, to maintenance.
Download MELSOFT EM Motion SDK from Mitsubishi Electric FA global website.
To create an application *1 , use a motion API running on Windows ® .
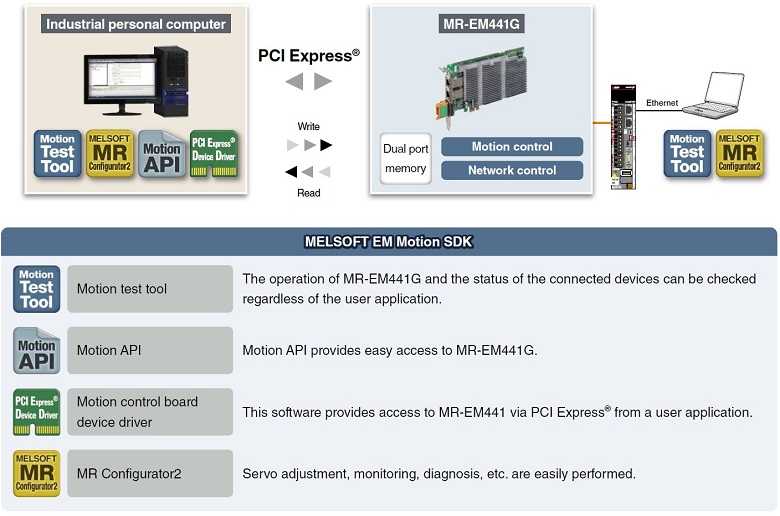
- *1: OS and the development environment are not included and must be prepared by the user.
Specifications
Control specifications
| Function | Specifications |
|---|---|
| Maximum number of control axes | 64 axes |
| Maximum number of connectable stations | 120 stations |
| Operation cycle settings | 62.5 *1 , 125, 250, 500, 1000, 2000 |
| Operation mode settings | High-speed operation mode, normal operation mode |
| JOG operation | Provided |
| Incremental feed | Provided |
| Automatic operation | Point table method, 1-axis control, continuous operation to torque control, pressure control *2 , start condition |
| Linear interpolation | Point table method (up to 4 axes) |
| Circular interpolation | Point table method (2 axes) |
| Home position return | Driver home position return (the home position return method set in a servo amplifier) |
| Home position reset | Provided |
| Direct control | Position control Number of command buffers: Up to 64 units |
| Electronic gear | Electronic gear numerator: 1 to 5242879 Electronic gear denominator: 1 to 589823 |
| Speed units | Command unit/min, command unit/s, r/min |
| Acceleration/deceleration method | Linear acceleration/deceleration, smoothing filter, S-curve acceleration/deceleration, jerk ratio acceleration/deceleration, vibration suppression command filter 1 |
| Stop function | Forced stop (select the signal in the parameters), operation stop, rapid stop |
| Command change | Position, speed, time constant |
| Application function | Hardware stroke limit, software stroke limit, interlock, rough match output, torque limit, command change (position/speed/time constant), backlash, position switch, absolute position detection system, other axes start, pass position interrupt, I/O device, pressure control *2 , continuous operation to torque control, interference check function, etc. |
| Auxiliary function | Parameter read/write, alarm/system error, monitor (current position, feedback position, speed command, position droop, electrical current command, alarm number, external signal status, etc.), high speed monitor (current position, feedback position, moving speed, feedback moving speed, external signal, electrical current feedback, position droop), interrupt (during start operation, operation stoppage, when alarm occurs (servo alarm/operation alarm), etc.), user watchdog function, software reboot function, sampling, operation cycle monitor function, servo amplifier disconnect, file control, time management, link-down detection function, event history, event detection function, etc. |
| Tandem operation | Up to 2 axes × 8 groups |
| Board ID | 0 to 3 |
- *1: When the operation cycle is 62.5 μs, some functions are not available.
- *2: Use pressure control by combining MR-EM441G with MR-J5-G-LL.
Motion control board specifications
| Function | Specifications |
|---|---|
| Maximum number of control axes | 64 axes |
| Maximum number of connectable stations | 121 stations (including the master station) |
| Servo amplifier connection method | CC-Link IE TSN |
| CC-Link IE TSN Class | B |
| Number of CC-Link IE TSN lines | 2 lines |
| Maximum distance between stations [m] | 100 |
| PERIPHERAL I/F | Ethernet |
| Number of input points | 4 points |
| Input response time [μs] | 200 |
| Number of output points | 4 points |
| Output response time [μs] | 1 |
| Number of Motion control boards for one personal computer | 4 |
| Bus specification | PCI Express ® 2.0 × 1 |
| Operating ambient temperature [℃] | 0 to 55 (Secure an air flow) |
| Cooling method | Air cooling (cooling fan required) |
| Current consumption | 3.3 V DC ± 9 % 1.0 A or less 12 V DC ± 8 % 1.4 A or less |
| Exterior dimensions [mm] | Half-length (167.65 × 111.15) |